Unmanned same-span multi-crown-block cooperative scheduling method and system, medium and terminal
A collaborative scheduling, unmanned driving technology, applied in manufacturing computing systems, instruments, data processing applications, etc., can solve problems such as inability to adapt to variability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0080] Embodiment 1. Path Conflict Judgment and Conflict Resolution
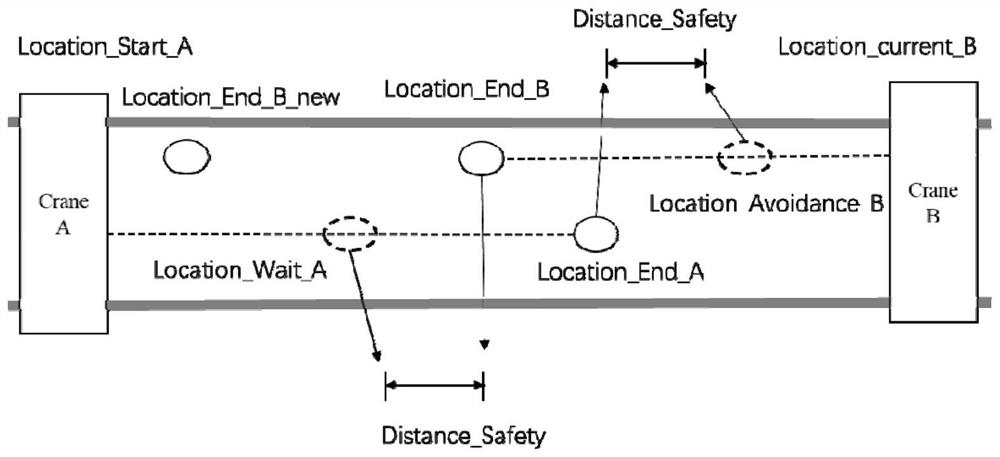
[0081] Such as image 3 As shown, in this embodiment, the job scheduling layer provides the planned path Path_A=(Location_Start_A, Location_End_A) for Crane_A, the current location of Crane_B is Location_current_B, and the end point is Location_End_B, that is, Path_B=(Location_current_B, Location_End_B).
[0082] First, block conflict judgment is performed on the crane Crane_A and the crane Crane_B. Since the closed area of Crane_B is empty, there is no conflict.
[0083] Then, a path conflict judgment is performed. Since Path_A and Path_B have overlapping overlap points, there is a path conflict.
[0084] Next, conflict resolution is performed. Location_End_B is the closest conflict point to the current position of Crane_A, and the safe waiting position Location_Wait_A is determined after considering the safety distance Distance_Safety. Therefore, the executable path of Crane_A is updated as Path_A=(L...
Embodiment 2
[0085] Embodiment 2. Conflict Judgment and Conflict Resolution in Blocked Areas
[0086]Such as image 3 As shown, in Embodiment 1, after the execution path (Location_Start_A, Location_Wait_A) of the crane Crane_A and the execution path (Location_current_B, Location_End_B) of the crane Crane_B are respectively completed, the crane Crane_A waits, and the job scheduling layer gives the planned path Path_B for the crane Crane_B= (Location_End_B, Location_End_B_new).
[0087] In this embodiment, block conflict judgment is performed first. Since the path Path_B=(Location_End_B,Location_End_B_new) and the blocking zone Blocking_Zone=(Crane_A,Location_Wait_A,Location_End_A) have overlapping overlapping points, it is determined that there is a blocking zone conflict between the crane Crane_A and the crane Crane_B. At this time, Crane_B is the target crane, and Crane_A is the adjacent crane.
[0088] Next, conflict resolution is performed. It is determined that the safe avoidance p...
Embodiment 4
[0089] Embodiment 4: Changes in destinations of cranes, faults or abnormalities of adjacent cranes, etc.
[0090] Such as Figure 4 shown. In this embodiment, crane Crane_B is in the process of hoisting, and crane Crane_A is waiting at Location_Wait_A, its destination is Location_End_A, and its blocking zone is Blocking_Zone=(Crane_A, Location_Wait_A, Location_End_A). The destination of the crane is changed due to emergency order insertion, or the destination of Crane_A is canceled due to the failure or abnormality of the adjacent crane Crane_B. At this time, the job scheduling layer gives the latest path Path_A=(Location_Wait_A, Location_End_A_new) of Crane_A.
[0091] First, block conflict judgment is performed. Since the blocking zone Blocking_Zone and the path Path_A belong to Crane_A, there is no blocking zone conflict, and the blocking zone is set to empty.
[0092] Then, path conflict judgment is performed. Since the path Path_A and the path (Location_End_B, Locati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com