Impedance control method and device, impedance controller and robot
An impedance control, robotic arm technology, applied in impedance control methods, impedance controllers, robots, and devices, and can solve problems such as the inability to achieve independent control of position or force, the inability of the robotic arm to track the desired interaction force, and the inability to achieve desired force control. , to simplify the control complexity, improve flexibility and safety, and enhance the effect of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
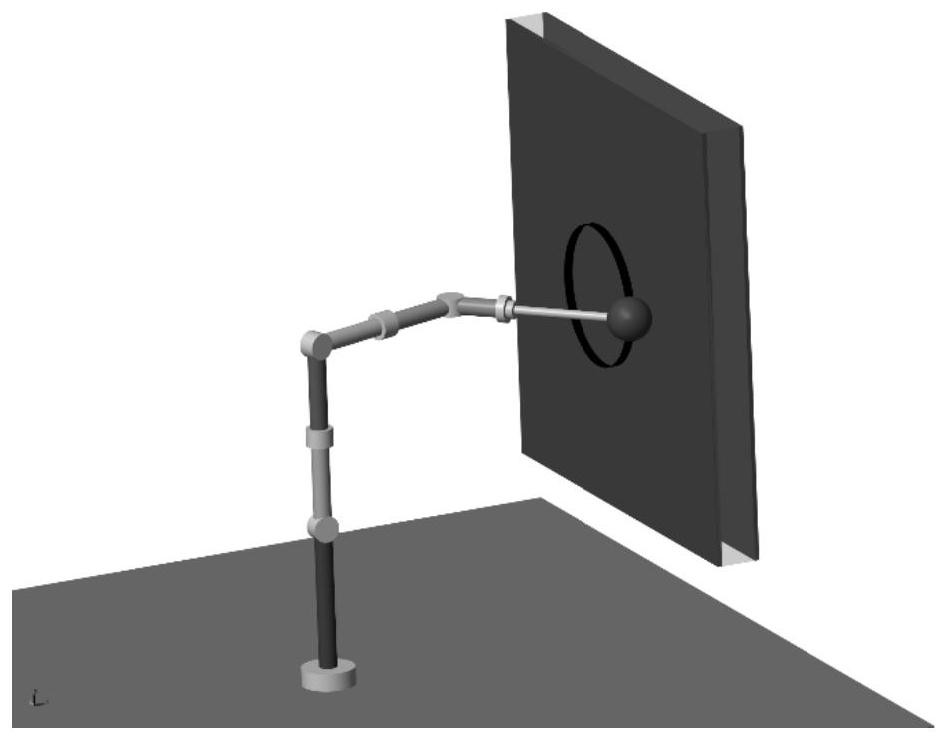
[0064] Please refer to Figure 4 , this embodiment proposes an impedance control method, which can be applied to torque control of a mechanical arm or a robot with redundant degrees of freedom and degrees of freedom at the end. Since the impedance control method is aimed at the impedance control in the Cartesian space, that is, the end of the manipulator performs tasks in the Cartesian space, the Cartesian space in this embodiment is also called the task space.
[0065] The impedance control method will be described in detail below.
[0066] In step S110, the current joint motion information and joint force information of the manipulator in the joint space and the actual interaction force received by the end are obtained, and the actual motion information of the end in the task space is obtained through forward kinematics according to the joint motion information.
[0067] In an embodiment, the actual motion information of the terminal mainly includes the actual position, act...
Embodiment 2
[0113] Please refer to Figure 9 , based on the impedance control method of the above-mentioned embodiment 1, this embodiment proposes an impedance control device 10, which includes:
[0114] The information acquisition module 110 is used for the current joint motion information and joint force information of the robotic arm in the joint space and the actual interaction force received by the end, and solves the actual motion of the end in the task space through forward kinematics according to the joint motion information information.
[0115] The impedance control quantity calculation module 120 is used to calculate the modified expected trajectory of the terminal by using the current environment information and the expected terminal interaction force planned in advance in the task space, according to the joint force information, the actual interaction force, the The impedance control torque of the manipulator in the joint space is obtained by calculating the actual motion in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com