Unmanned ship laser radar point cloud data correction method based on attitude sensor and GNSS
An attitude sensor, point cloud data technology, applied in the field of unmanned ship lidar point cloud data correction based on attitude sensor and GNSS, can solve information errors such as hull roll and trim, lidar ranging, rotation angle, etc. Affect the target recognition accuracy and other issues, to achieve the effect of improving the accuracy and improving the scanning resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
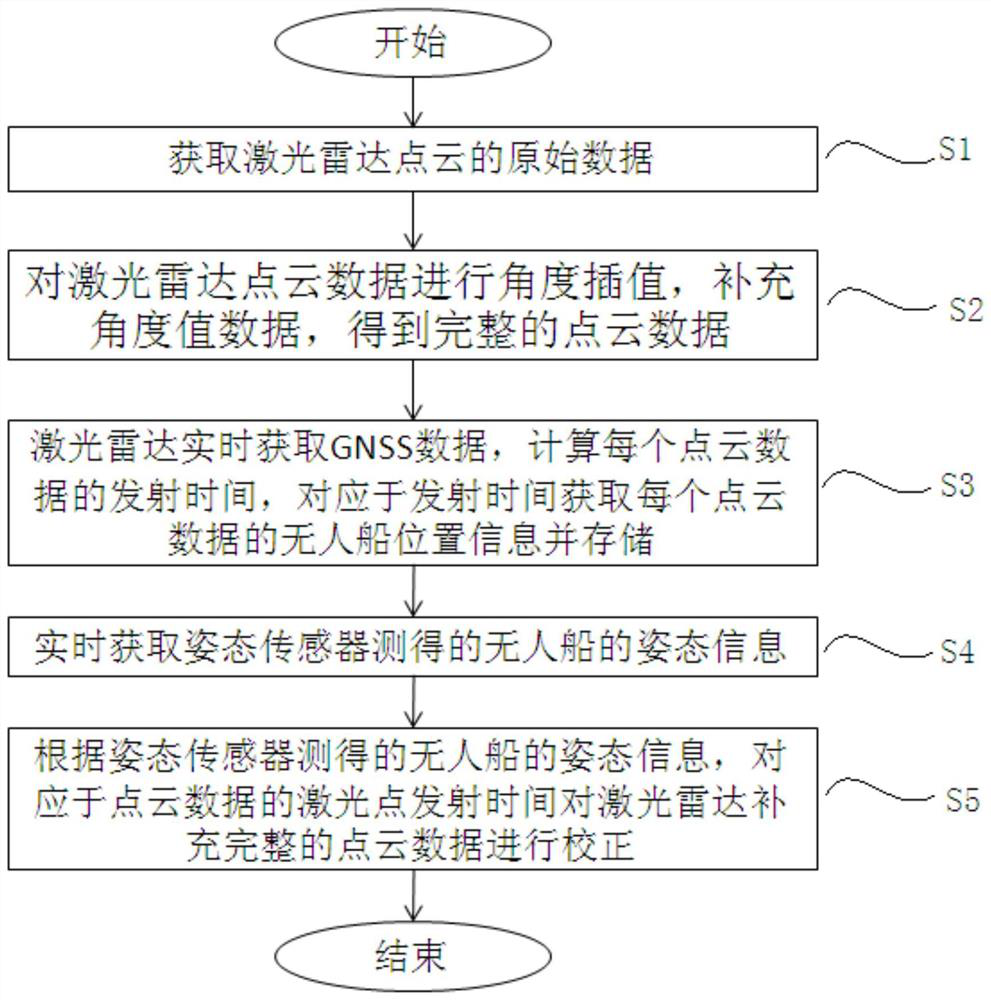
[0037] figure 1 It is a flow chart of an unmanned ship lidar point cloud data correction method based on an attitude sensor and GNSS in an embodiment of the present invention.
[0038] See figure 1 , the method for correcting unmanned ship lidar point cloud data based on attitude sensor and GNSS in the embodiment of the present invention comprises the following steps:
[0039] S1: Obtain the raw data of the lidar point cloud;
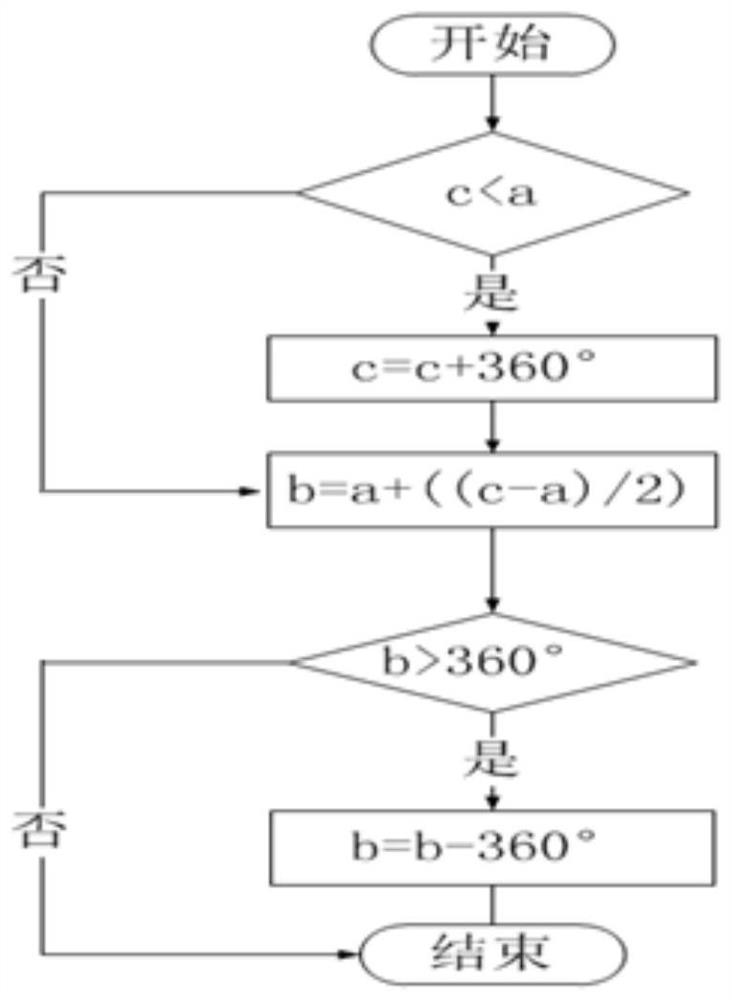
[0040] S2: Perform angle interpolation on the lidar point cloud data, supplement the angle value data, and obtain complete point cloud data;
[0041] S3: The laser radar acquires GNSS data in real time, calculates the laser emission time of each point cloud data, and obtains and stores the unmanned ship position information of each point cloud data corresponding to the emission time;
[0042]S4: Obtain the attitude informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com