Novel unmanned aerial vehicle group brain-computer cooperative intelligent control method
An intelligent control and unmanned aerial vehicle technology, applied in non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve problems such as crashing, poor interactivity, and lack of adaptability to unknown environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
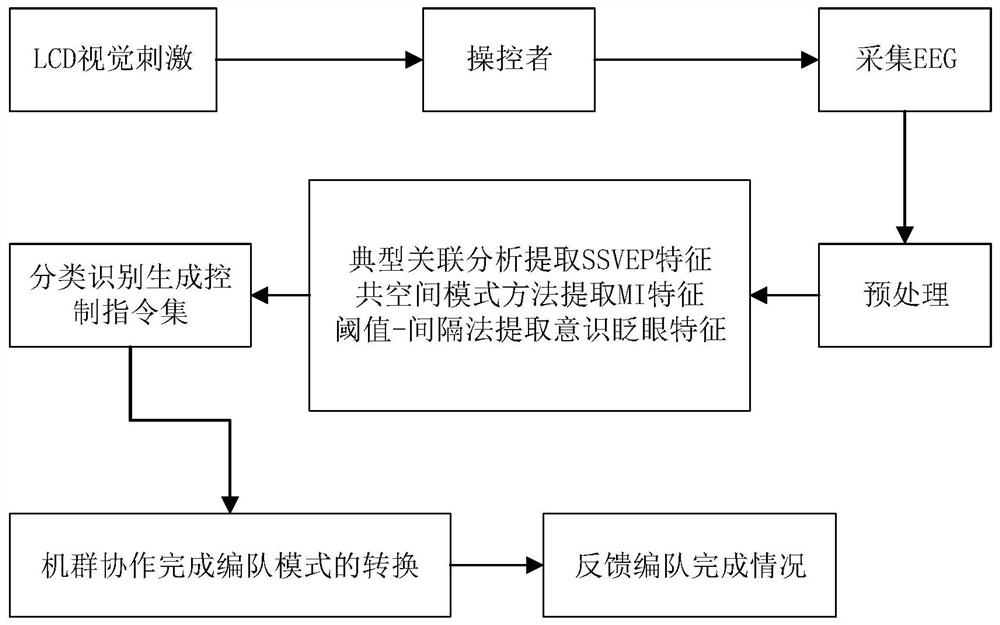
[0024] The specific implementation is as attached figure 2 shown, the details are as follows:
[0025] The general principle of the present invention is to distinguish the task state by collecting the EEG of the brain when the operator selects and makes decisions, and the computer completes complex calculations such as data processing feature extraction and provides the corresponding control strategy of the cluster to realize brain-computer collaboration, and completes the different tasks of the drone cluster. The control of formation mode switching in the task state achieves the purpose of managing the interaction between the fleet and solves the problems of poor interaction and lack of adaptability to unknown environments in fleet control. like figure 2 Shown is the framework of a specific embodiment. Use EEG detectors to collect the operator's EEG under imaginative movement / watching the LCD with different flickering frequencies / conscious blinking tasks, in which visual ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com