Data processing method based on self-moving rail transit mobile 3D scanning system
A rail transit and data processing technology, applied in image data processing, character and pattern recognition, image enhancement, etc., can solve the problems of inability to meet rail transit detection requirements, single software functions, inflexible measurement, etc., to reduce data processing work. The effect of improving data collection efficiency and reducing security risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0078] As shown in the figure, a mobile 3D scanning system for self-moving rail transit includes:
[0079] The mobile car is set on the track and can move along the track;
[0080] A laser scanner, used to collect laser data within the length range of the measured rail traffic and within a certain distance range on both sides of the track, and the laser data is stored in the laser scanner;
[0081] A structured light scanner, configured to collect track profile data of the track being measured, the track profile data being stored in the structured light scanner;
[0082] The inclination sensor is used to collect the inclination data of the angle change of the mobile vehicle during the movement;
[0083] The gauge sensor is used to collect the initial gauge data of the track during the movement of the mobile vehicle;
[0084] The speed encoder is used to collect the mileage data of the mobile vehicle moving on the track;
[0085] A PLC controller, installed on the mobile veh...
Embodiment 2
[0103] As shown in the figure, on the basis of Embodiment 1, the data processing method based on the mobile three-dimensional scanning system of self-moving rail transit includes the following steps:
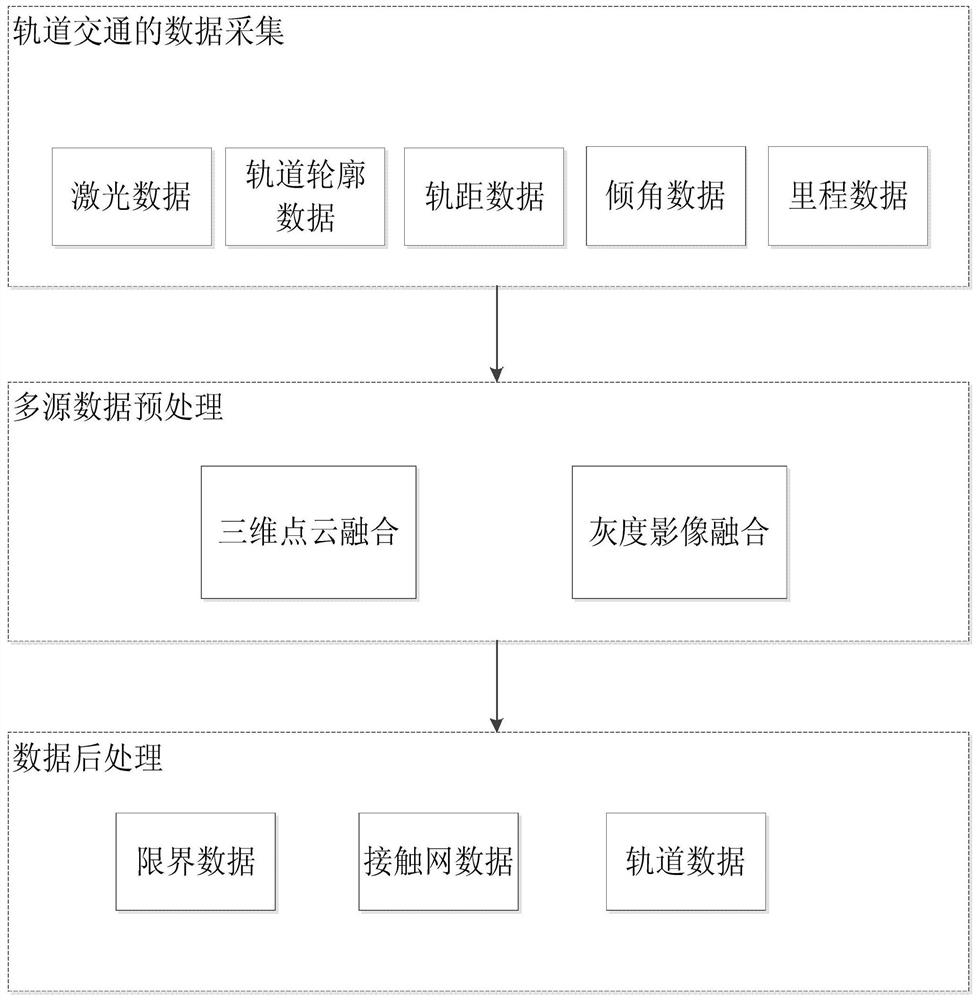
[0104] (1) Data collection of rail transit: use the self-moving rail transit mobile 3D scanning system to collect infrastructure and surrounding environment data along the measured rail transit, and obtain laser data, track profile data, inclination data, initial gauge data and mileage data, and transmit the inclination data, initial gauge data and mileage data to the host computer, the laser data is stored in the laser scanner, and the track profile data is stored in the structured light scanner;
[0105] (2) Multi-source data preprocessing: the laser data, track profile data, inclination data, initial gauge data and mileage data of the receiving step (1), and perform multi-source data fusion processing on the multi-source data to generate 3D point cloud, grayscale image, gauge...
Embodiment 3
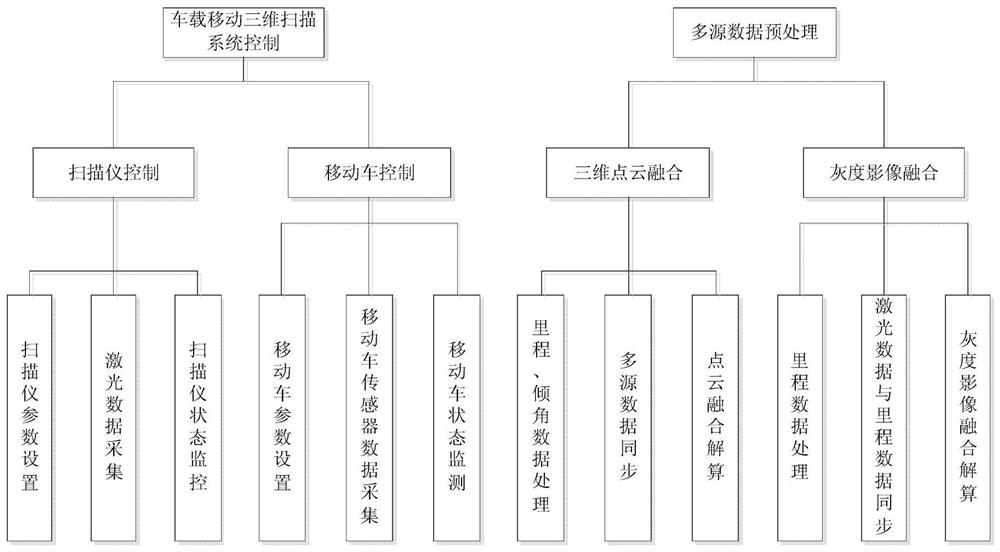
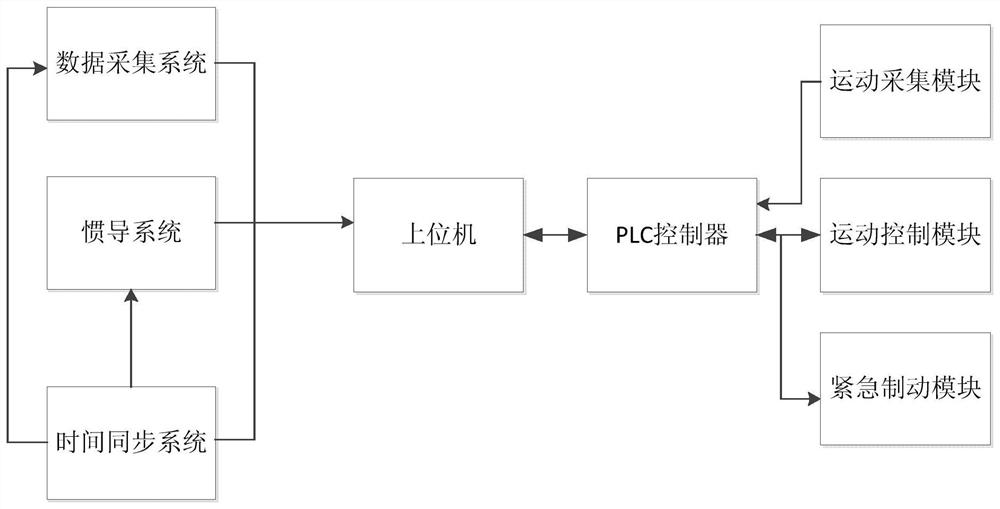
[0128] On the basis of Example 2, such as Figure 2-Figure 11 As shown, an operating system is embedded in the host computer, and the host computer communicates with the PLC controller on the mobile vehicle through serial port communication. The operating system is used to receive laser scanners, structured light scanners, and speed encoders. , the multi-source data transmitted by the inclination sensor and the gauge sensor, analyze and fuse the multi-source data collected by multiple sensors, generate a three-dimensional point cloud and a grayscale image, and generate instructions according to the analysis results to control the mobile vehicle, according to the After the 3D point cloud and grayscale image are extracted and analyzed to obtain the measurement data required for rail inspection, the inspection of rail transit is completed.
[0129] Further, the operating system of the host computer includes a vehicle-mounted mobile three-dimensional scanning system control module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com