Linear driving device of surgical robot and surgical robot
A surgical robot and linear drive technology, applied in the field of medical devices, can solve the problems of inability to meet the application requirements of surgical robots, lack of versatility, and no quick-change function, achieving the effects of simple structure, avoiding line entanglement, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
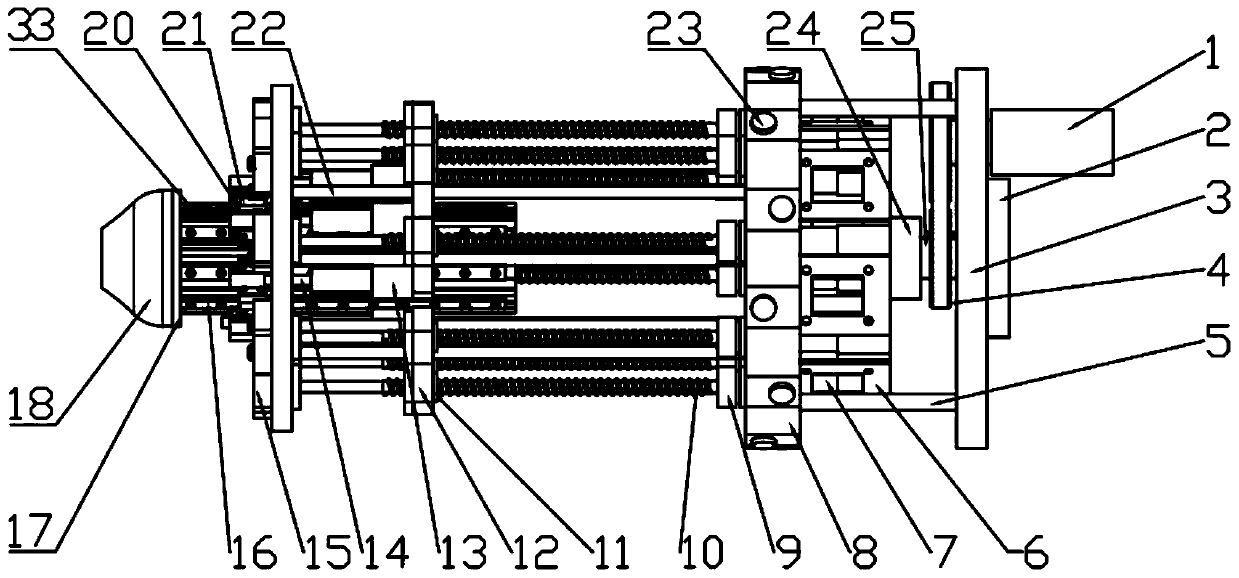
[0038] This embodiment provides a linear drive device for a surgical robot, such as figure 1 As shown, it includes a rotation degree of freedom module, an instrument drive module, a motion transmission module and a quick change module. The rotation degree of freedom module is connected to the instrument drive module, and the output end of the instrument drive module is connected to the motion transmission module to realize the output motion The transmission; the output end of the motion transmission module is connected with the quick change module to realize the quick change of the quick change module and the end effector.
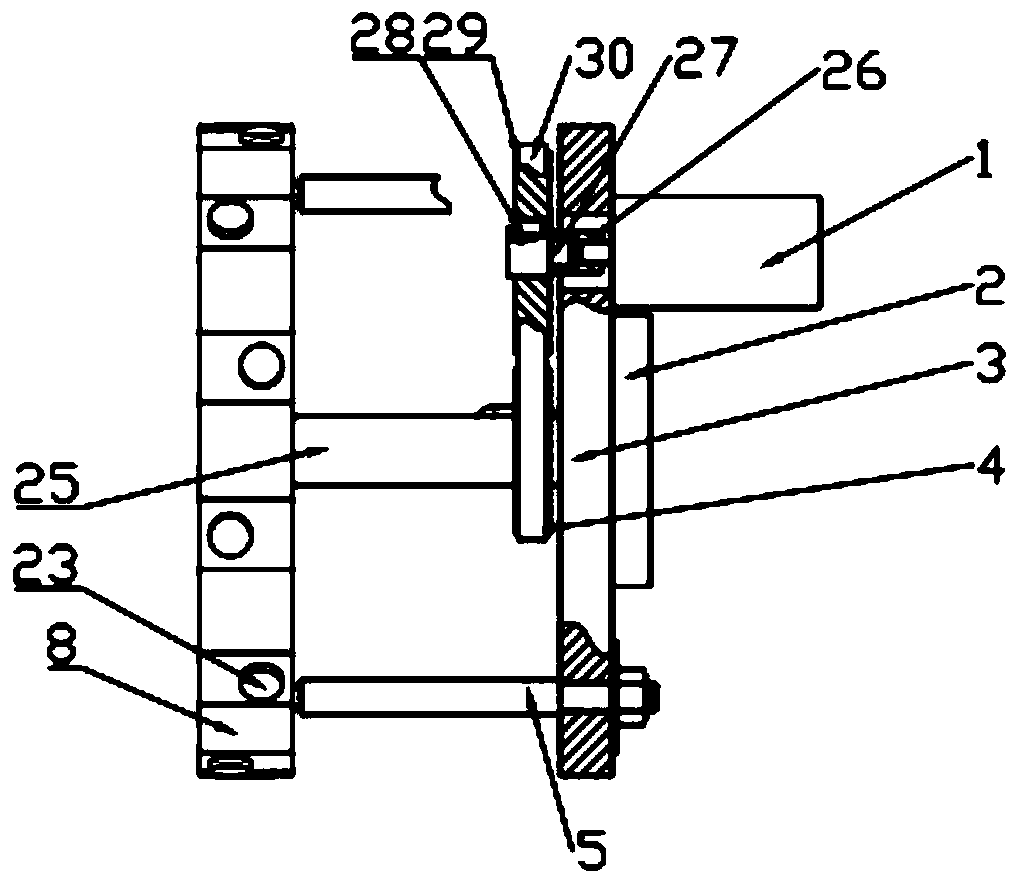
[0039] Specifically, the rotational degree of freedom module includes a rotary joint and a drive mechanism, and the drive mechanism is connected to the instrument drive module and the motion transmission module through the rotary joint to realize the overall rotation of the device. Such as figure 2As shown, the drive mechanism includes a first drive moto...
Embodiment 2
[0054] This embodiment provides a surgical robot, including the linear drive device described in Embodiment 1 and a surgical instrument, the surgical instrument is connected to the linear drive device, and the surgical instrument can be a continuous surgical instrument, or a rigid surgical instrument .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com