Double-rigid-body characteristic point saturation fixed time relative pose tracking control method
A technology of relative pose and fixed time, which is applied in attitude control, three-dimensional position/course control, vehicle position/route/altitude control, etc., and can solve problems such as the inability to simultaneously deal with actuator saturation and fixed time convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
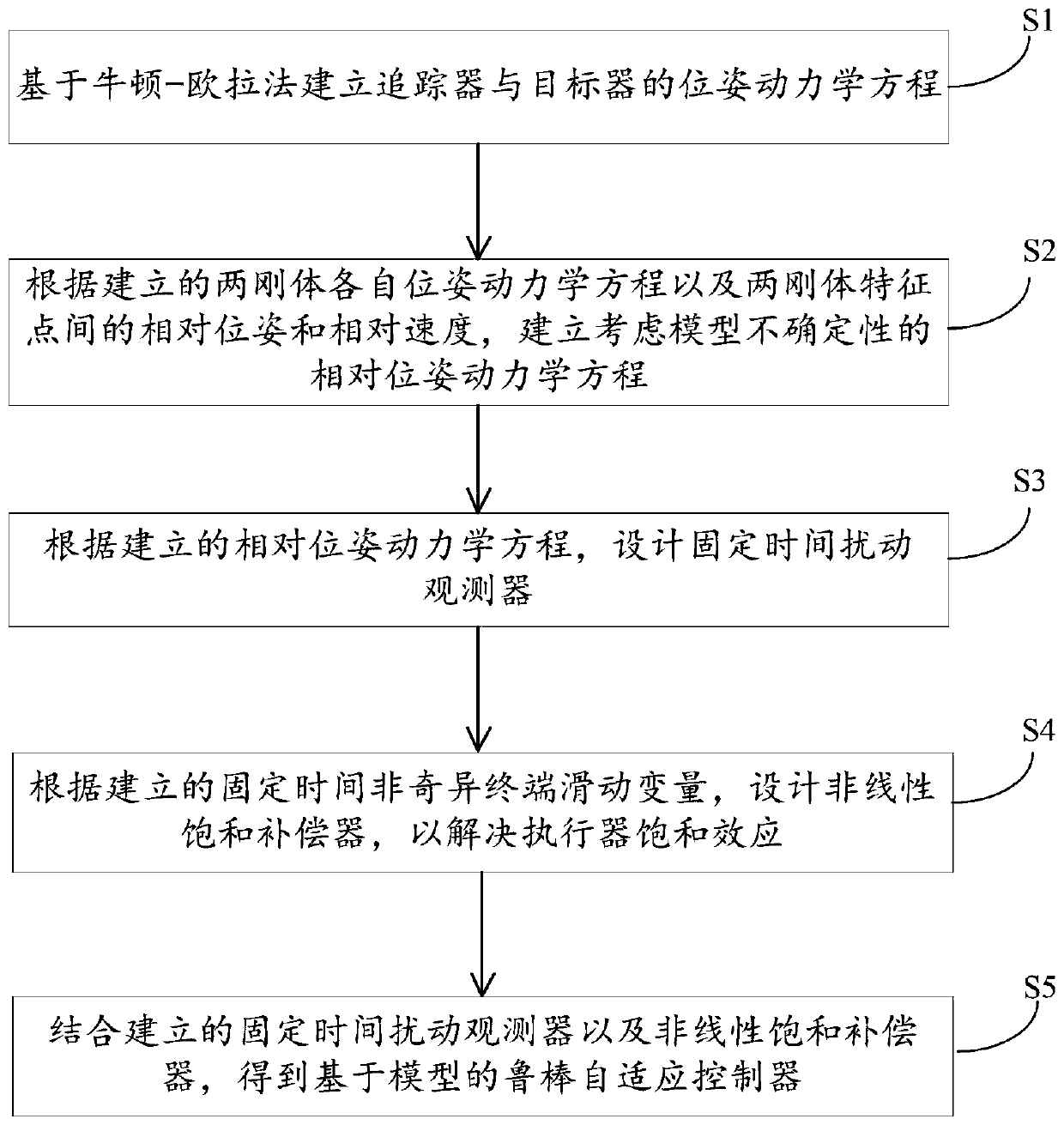
[0116] Embodiments of the present invention provide a method for tracking relative poses and attitudes between feature points of double rigid bodies with saturation fixed time, such as figure 1 As shown, the method includes the following steps:
[0117] S1. Based on the Newton-Euler method, establish the pose dynamic equation of the tracker and the target;
[0118] S2. According to the established dynamic equations of the respective poses of the two rigid bodies and the relative poses and relative velocities between the feature points of the two rigid bodies, establish a relative pose dynamics equation considering model uncertainty;
[0119] S3. Design a fixed-time disturbance observer according to the established relative pose dynamic equation;
[012...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com