


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Moxibustion robot and full-automatic moxibustion method
A robotic and fully automatic technology that can be used in instruments, manipulators, instruments for determining reflection points, etc., and can solve research difficulties and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
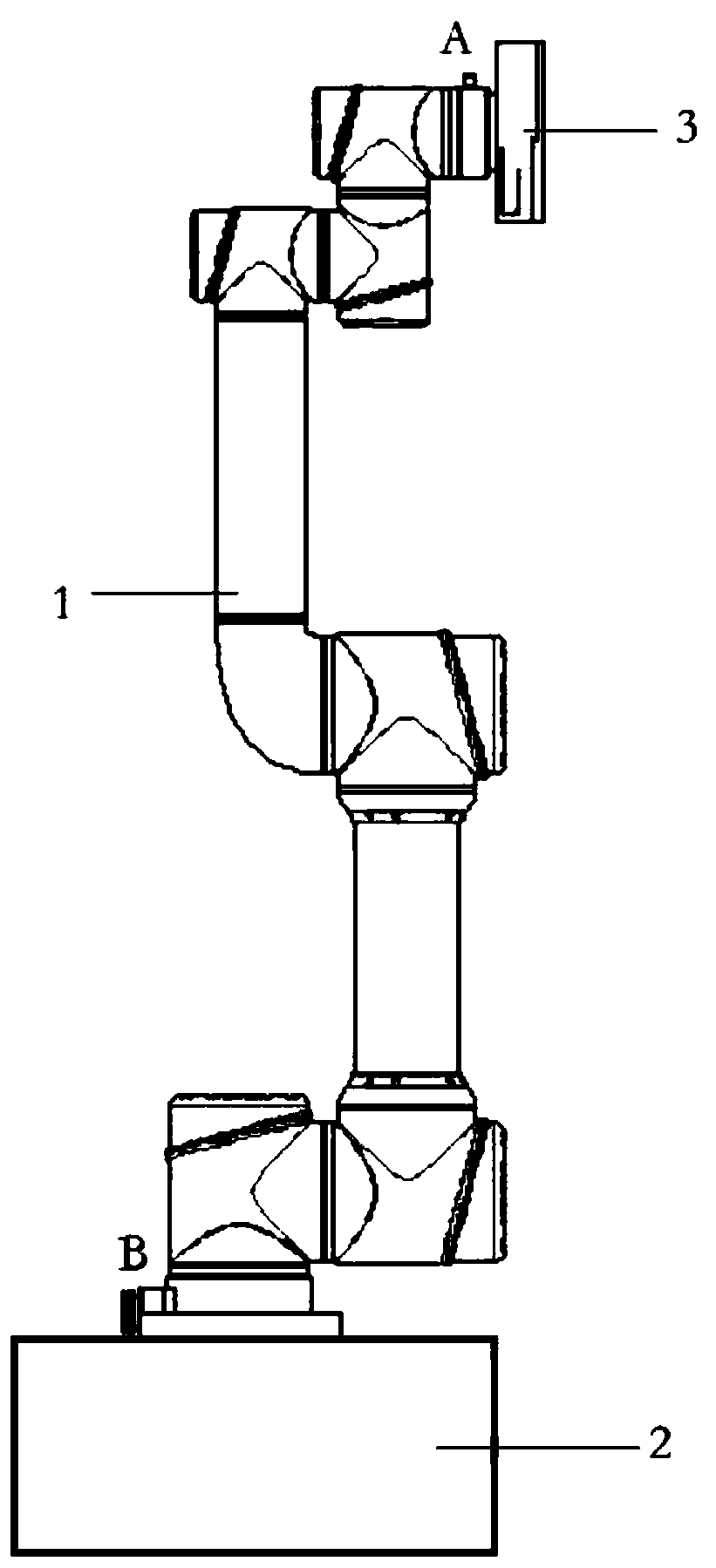
[0114] combine Figure 1 to Figure 3 It can be seen that the moxibustion robot includes a robot skeleton 1. In this embodiment, we use a six-degree-of-freedom robot arm. One end of the robot skeleton is a functional module connection end with a fixed structure, that is, the A end. The end of the other end is the connection end of the fixed seat, that is, the B end. The fixed seat connection end is fixedly connected to the fixed seat 2, and also includes a moxibustion function module 3, and the moxibustion function module 3 is connected through a fixed connection. The component is fixedly connected with the functional module connection end B of the robot skeleton.
[0115] The connection method between the moxibustion function module 3 and the fixing seat 2 and the robot frame 1 can be determined according to the structure on the robot frame 1, and the flange connection method is more commonly used in the prior art. That is to say, flange heads are provided on both ends A and ...
Embodiment 2
[0124] On the basis of Example 1, below we combine Figure 4 Let's take a closer look at the structure of the fully automatic moxibustion robot.
[0125] Such as Figure 4 As shown in , on the basis of the moxibustion robot, it also includes a host computer system 11, and the control system of the robot skeleton communicates with the host computer system 11 through wired or wireless communication. In this embodiment, we carry out communication connection through wireless data transmission.
[0126] Such as Figure 4 As shown in , it also includes an image acquisition device 12, and the image acquisition device 12 and the host computer system 11 are also preferably in a wireless communication connection in this embodiment. Such as Figure 4 As described in , in this embodiment, the image acquisition device is a camera, and the image acquisition device is installed directly above the treatment bed 13 .
Embodiment 3
[0128] Below we take moxibustion on the governor vessel as an example to illustrate the fully automatic moxibustion method disclosed in the present invention, including the following steps:
[0129] S1: acquiring a human body image through an image acquiring device;
[0130] S2: The upper computer system automatically calculates and obtains the movement data of the moxibustion function module of the acupuncture points or meridians designated for moxibustion operation according to the human body image obtained in S1 and the standard data stored in the data storage module;
[0131] S3: The upper computer system sends the motion data of the moxibustion function module obtained in S2 to the control system of the robot skeleton through the communication module;
[0132] S4: According to the motion data in the control system, the robot skeleton moves the execution device by controlling the driving device to complete the specified moxibustion operation.
[0133] The fully automatic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com