A multi-UAV cooperative control system and method based on ADRC control
A collaborative control and multi-UAV technology, applied in control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., to achieve the effect of reducing load capacity, smooth carrying process, and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
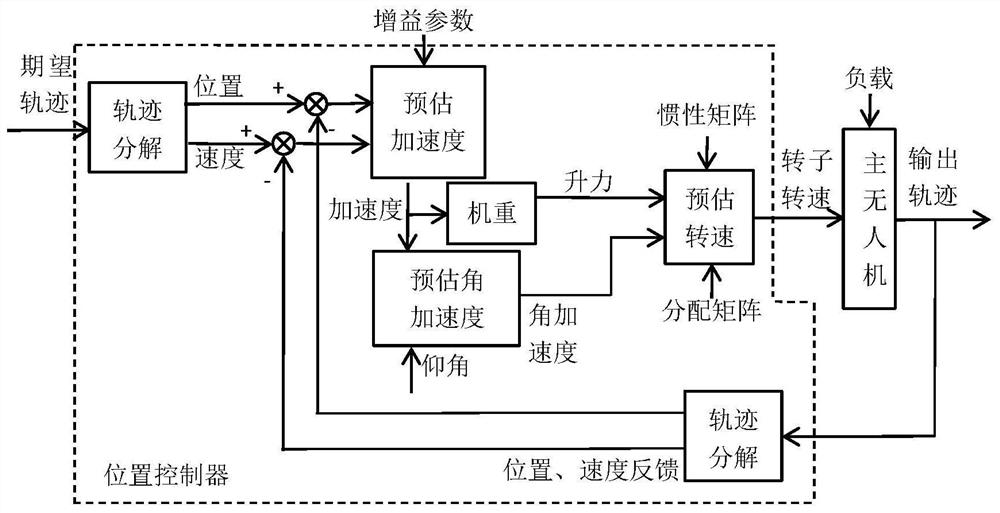
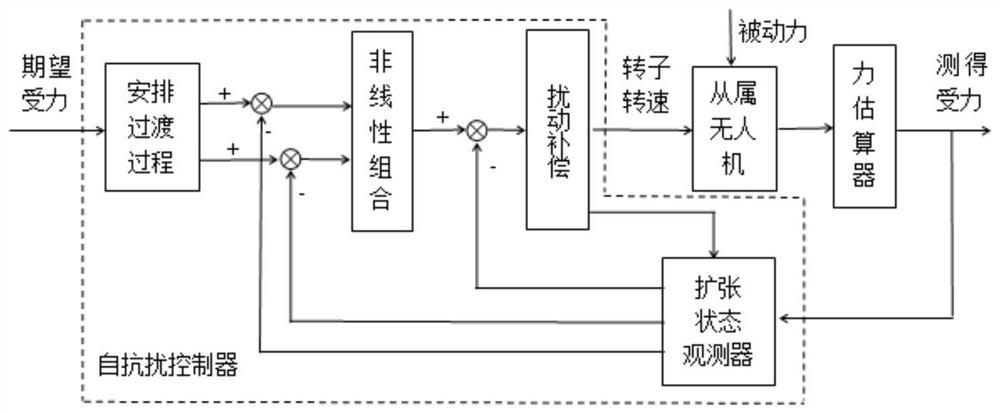
[0120] The present invention uses a position controller to realize the required fixed-value control for the main UAV, and achieves the purpose of fixed-value control by eliminating the deviation between the expected position coordinates and the measured position coordinates; it proposes a multiple control method that uses passive force as the controlled variable. UAV cooperative control system, the communication between the master UAV and the slave UAV can compensate the passive force by estimating the direction and magnitude of the passive force transmitted by the load to the slave UAV so that the slave UAV The external force on the UAV is zero, realizing the real-time follow-up of the slave UAV to the master UAV, solving the problem that the slave UAV will enter the out-of-control state when the signal is interrupted in the traditional multi-UAV cooperative control, and eliminating the master-slave Drone communication is dependent on communication speed and signal quality. A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com