Non-spherical-wrist 6R robot inverse kinematics obtaining method
A technology of inverse kinematics and kinematic equations, applied in the field of inverse kinematics of non-spherical wrist 6R robots, can solve problems such as inability to guarantee offline solution and real-time solution, cumbersome and time-consuming derivation process of inverse kinematics solution, etc. The derivation process is convenient, satisfying real-time, and the effect of clear geometric meaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in combination with specific embodiments.
[0043] A method for obtaining the inverse kinematics of a non-spherical wrist 6R robot:
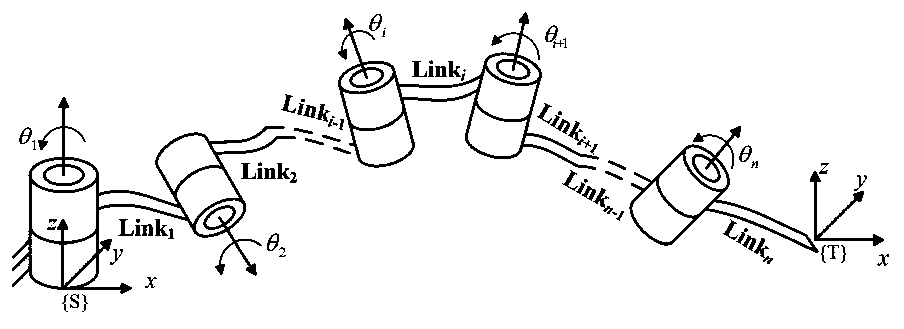
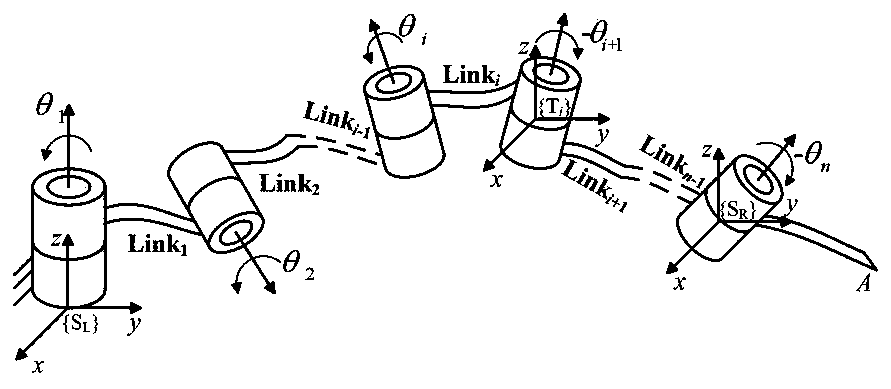
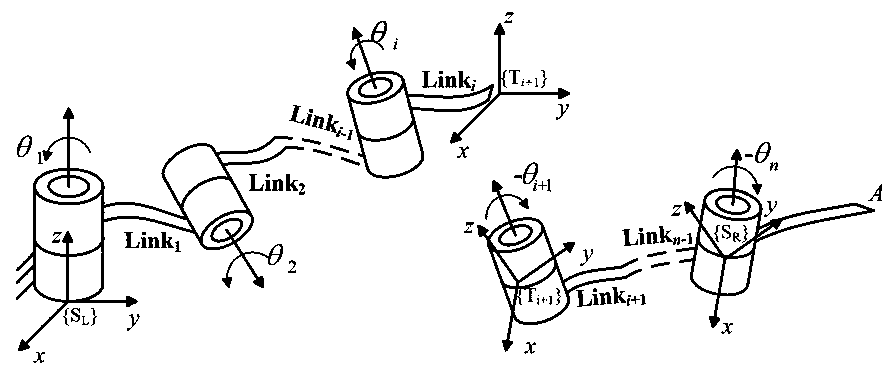
[0044] Screw representation of n-degree-of-freedom robot kinematics
[0045] The screw theory describes the movement of a rigid body in space as a combination of rotation and translation around a certain axis. Let ω=[ω x ,ω y ,ω z ] T ∈ R 3 Indicates the direction of the rotation axis of the rigid body, and r is the position of a point on the axis, then the motion screw of the rigid body can be expressed by ξ=[ω; v], where v=r×ω, ξ can also be called the helical axis of the rigid body. The antisymmetric matrix of ω is written as:
[0046]
[0047] Taking the antisymmetric matrix as an extension, the matrix form of ξ can be written as:
[0048]
[0049] The matrix exponential form of a rigid body is:
[0050]
[0051] where e θ[ω] =I+[ω]sinθ+[ω] 2 (1-cosθ)
[0052] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com