A method for adjusting the complexity of reference trajectories for active training of upper limb rehabilitation robots based on Bayesian optimization
A rehabilitation robot and reference trajectory technology, which is applied to manipulators, gymnastics equipment, sports accessories, etc., can solve the problem that patients cannot do motor learning, etc., and achieve the effect of being conducive to rehabilitation training, less iterations, and fast adaptive adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
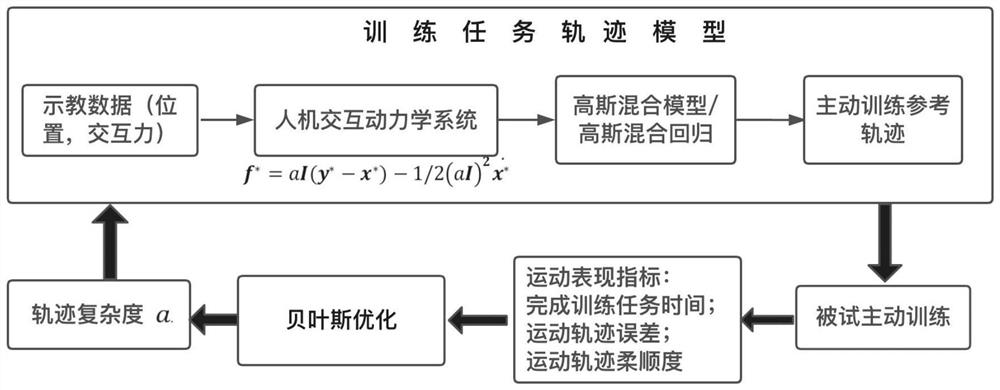
[0032] The present invention designs an upper limb rehabilitation robot active training reference trajectory complexity adjustment method based on Bayesian optimization, such as figure 1 As shown, the steps are as follows:
[0033] Step 1: Substitute the teaching trajectory x and the teaching force f into the human-computer interaction dynamic system to obtain the attractor y, and use the Gaussian mixture model GMM and Gaussian mixture regression GMR to model the attractor y, and obtain a comprehensive multiple demonstration experience The reference attractor y * ;
[0034] Step 2: Select the time taken to complete the training task b T , motion track error b E and motion track compliance b S As the sports performance index of the subject, the sports performance index vector b=[b T ,b E ,b S ];
[0035]Step 3: Determine the task tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com