Three-dimensional point cloud orientation correction method based on SFM
A 3D point cloud and orientation technology, applied in image data processing, instruments, calculations, etc., can solve problems such as increased flight workload, increased flight cost, and lack of 3D plane space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
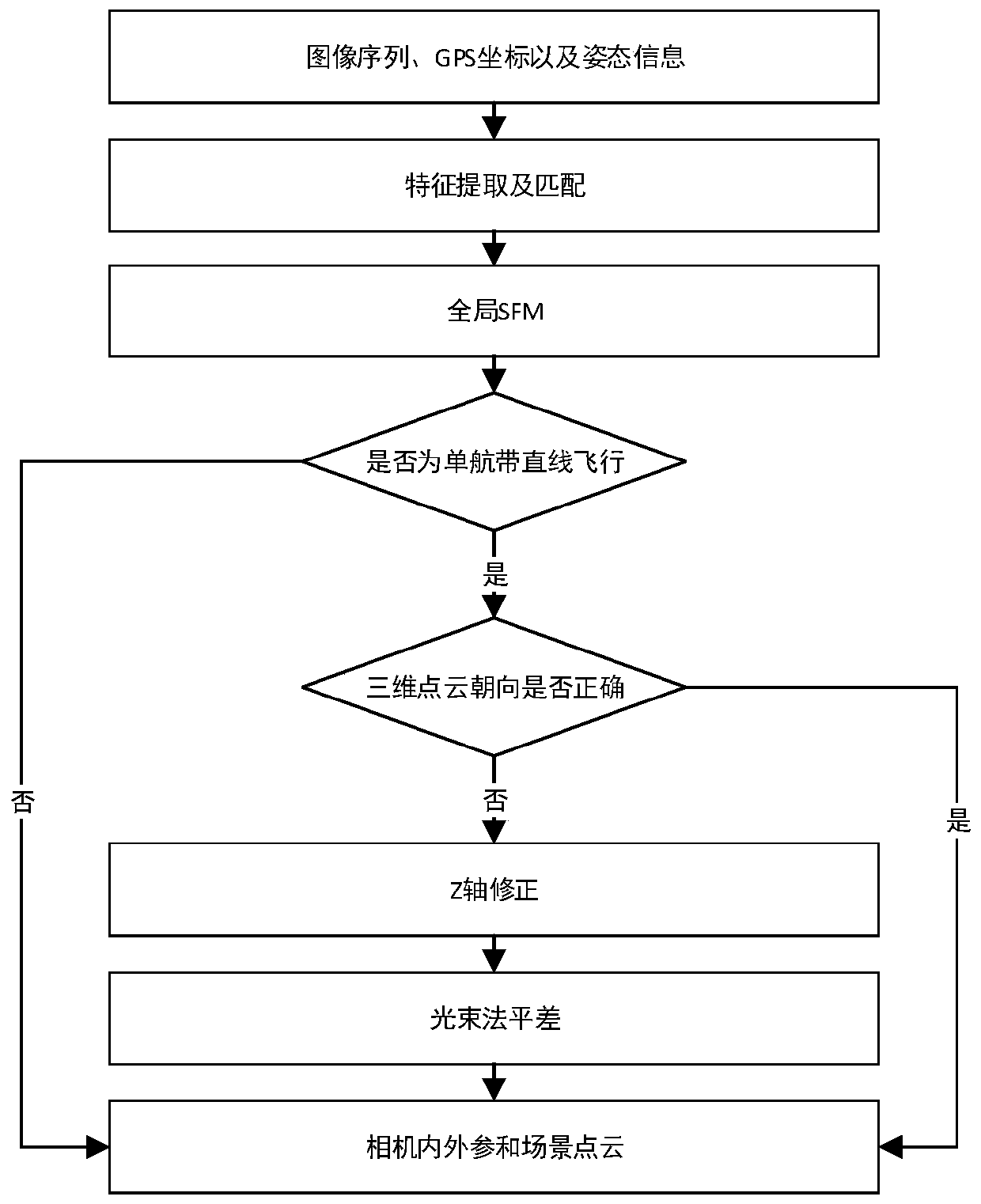
[0059] see figure 1 , the method first extracts the SIFT features of the image sequence and performs feature matching. Secondly, the global SFM method is used to estimate the internal and external parameters of the camera and the scene point cloud of the image sequence. At the same time, according to the GPS coordinates, it is judged whether the scene is a straight-line flight with a single flight path. Then, according to the external parameters of the camera, it is judged whether the orientation of the 3D point cloud is correct. Finally, the attitude information is used to optimize the SFM result, and the 3D point cloud orientation is correct, and the camera internal and external parameters and the scene point cloud are obtained.
[0060] The present invention specifically comprises the following steps:
[0061] Step 1: After SIFT feature extraction is performed on each image, the initial image pair ij of image i and its adjacent image j is established according to the GPS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com