Master-slave robot system for thoracoabdominal cavity minimally invasive surgery and configuration method of system
A robot system and minimally invasive surgery technology, applied in the master-slave robot system and configuration of thoracic and abdominal minimally invasive surgery, in the field of new surgical robots, which can solve the problems of excessive land occupation, high price, and complicated adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0183] The present invention will be described in further detail below in conjunction with the accompanying drawings.
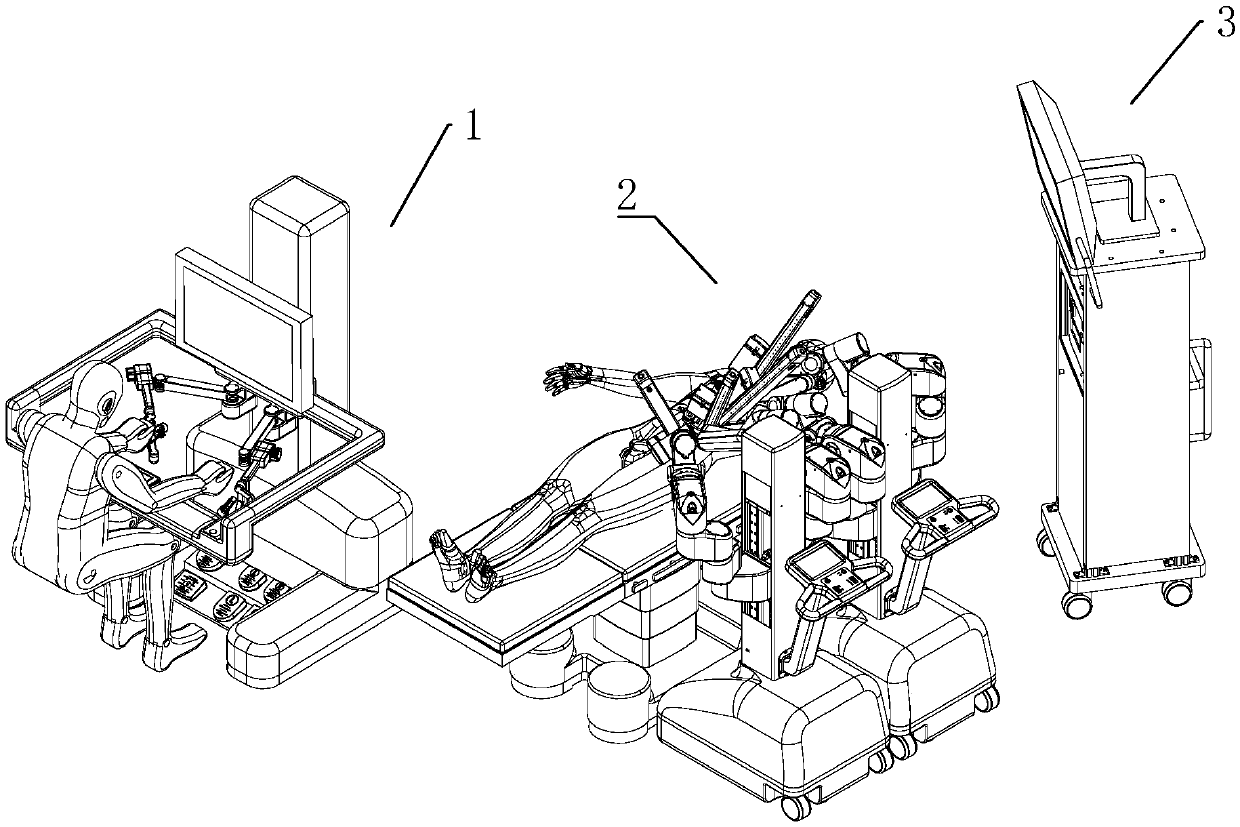
[0184] see figure 1 As shown, the thoracoabdominal minimally invasive surgery system consists of a surgeon console 1, a bedside operating arm trolley system 2, and an imaging and instrument system 3. The operating arm trolley system 2 pre-adjusts and pre-positions the operating position. The imaging and instrument system 3 observes the operation position in real time, assisting the doctor to observe the wound position, so that the doctor can remotely operate the bedside surgical arm trolley system 2 to perform minimally invasive surgery. The bedside operating arm trolley system 2 can be set apart from the operating table through the operating trolley 7 . In order to facilitate configuration and have strong adaptability to different surgeries, this embodiment mainly introduces the technical solution of this system by taking the surgical trolley 7 as the move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com