Sliding mode repetitive controller suitable for four-rotor aircraft
A quadrotor aircraft, repetitive controller technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be further described below in conjunction with the accompanying drawings.
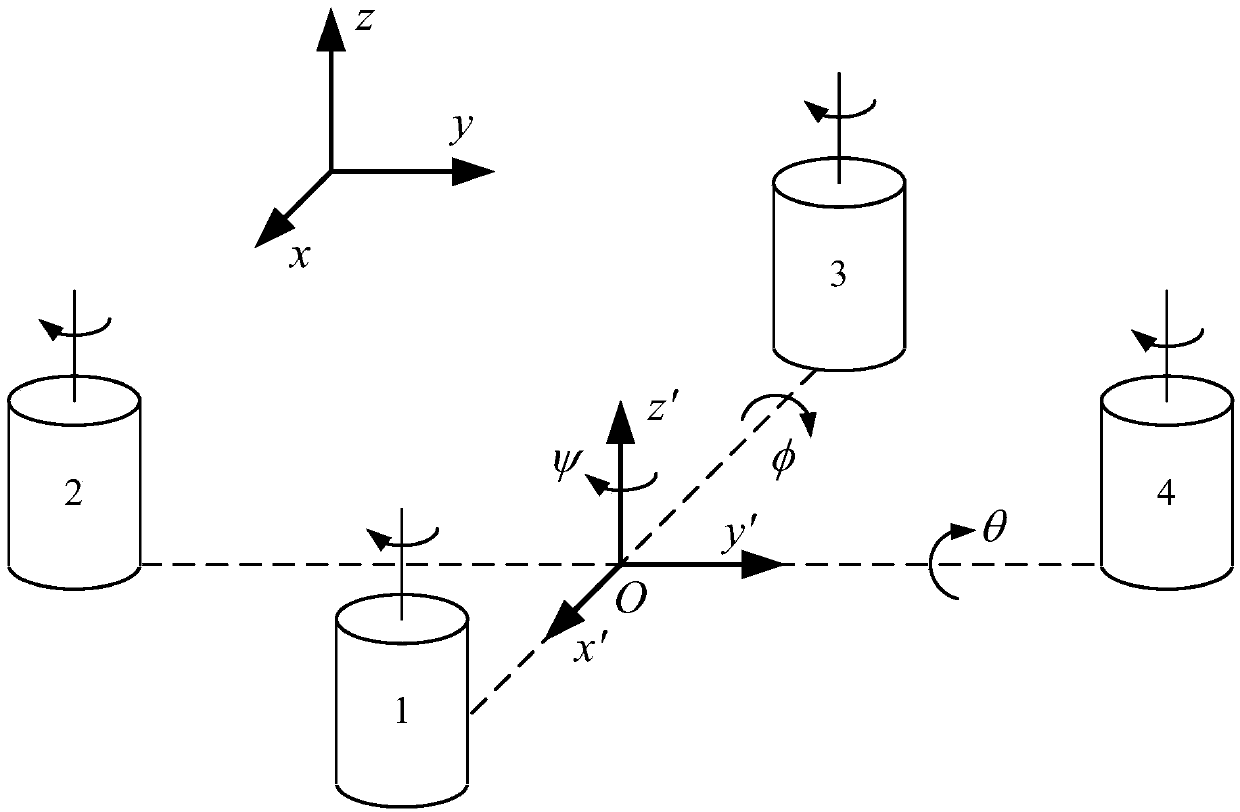
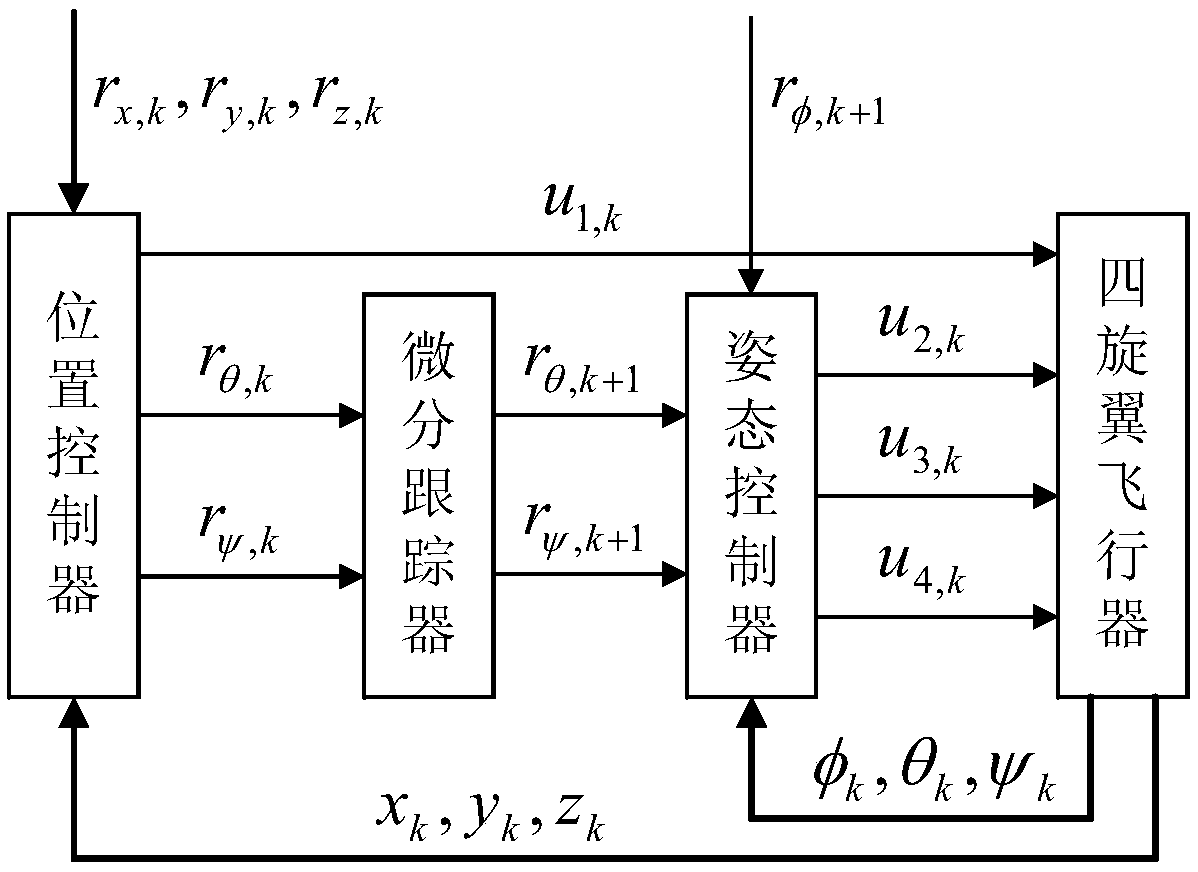
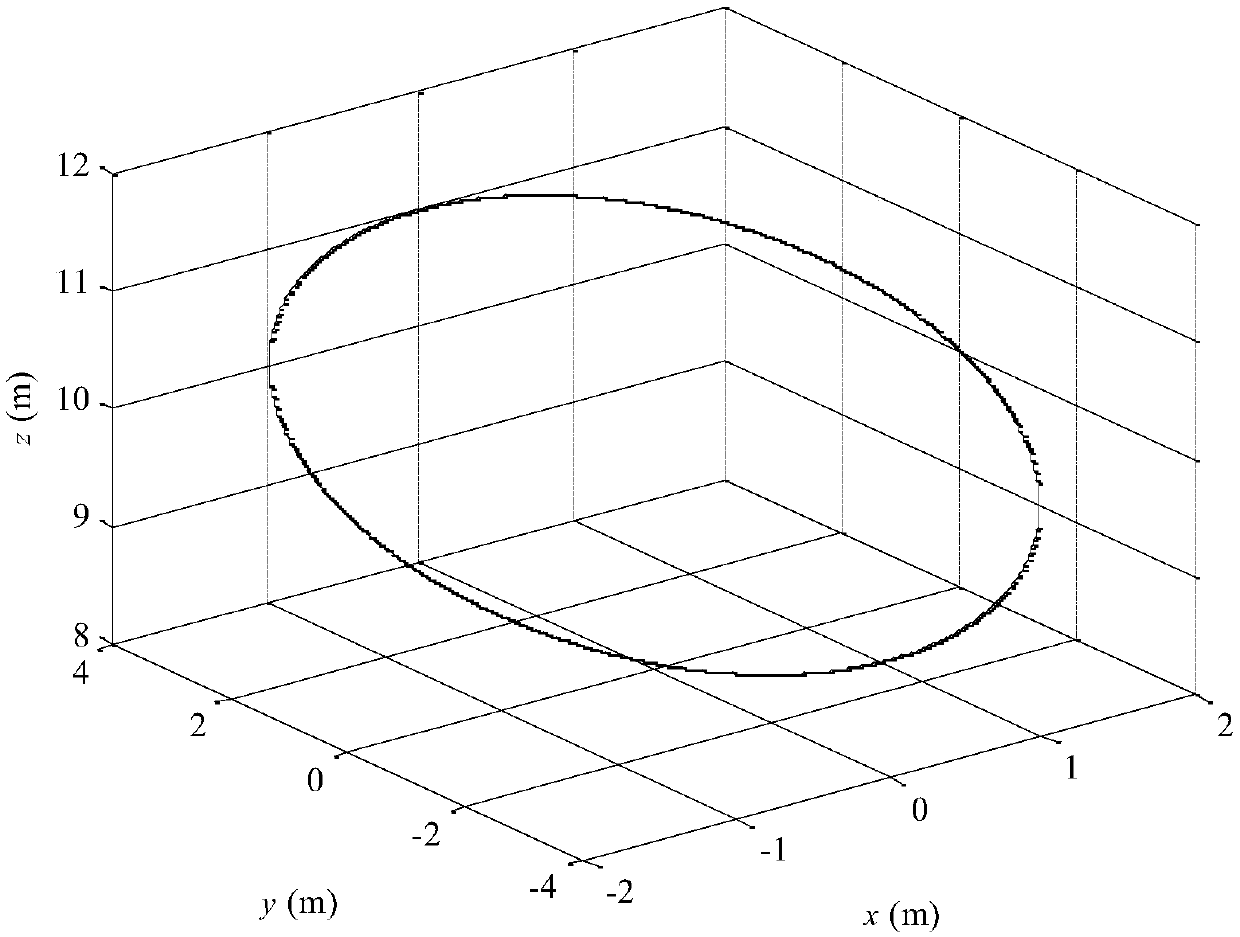
[0095] refer to Figure 2 to Figure 13 , a sliding mode repetitive controller suitable for quadrotor aircraft. First, the commonly used exponential reaching law is improved, and a new type of improved reaching law is designed by using high-order functions and logarithmic functions, and then the four-rotor aircraft's The dynamic model is discretized to suit the design of the digital controller, and then the position coordinate and attitude angle are decoupled through the virtual control quantity, and the discrete sliding mode repetitive controller is designed for the position subsystem and the attitude subsystem respectively to overcome the periodic disturbance , to realize the tracking control of the aircraft for a given trajectory.
[0096] In sliding mode control, the switching function described by the exponential reaching law cannot completely converge to the slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com