Unmanned aerial vehicle cluster meeting method based on deep reinforcement learning
A technology of reinforcement learning and unmanned aerial vehicles, applied to mechanical equipment, combustion engines, internal combustion piston engines, etc., to achieve the effect of ensuring control stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
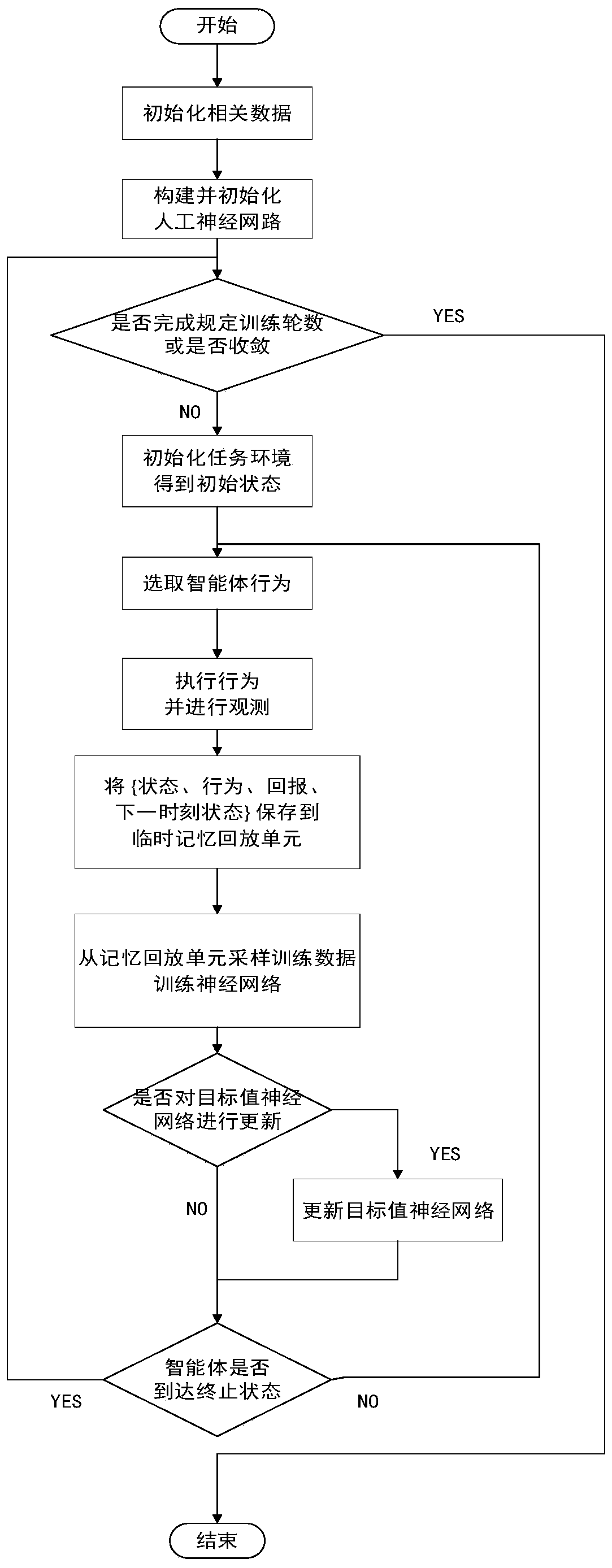
[0050] A UAV swarm rendezvous method based on deep reinforcement learning, which is divided into a training phase and an execution phase, including the following steps:
[0051] Step 1: Training phase, the specific steps are as follows:
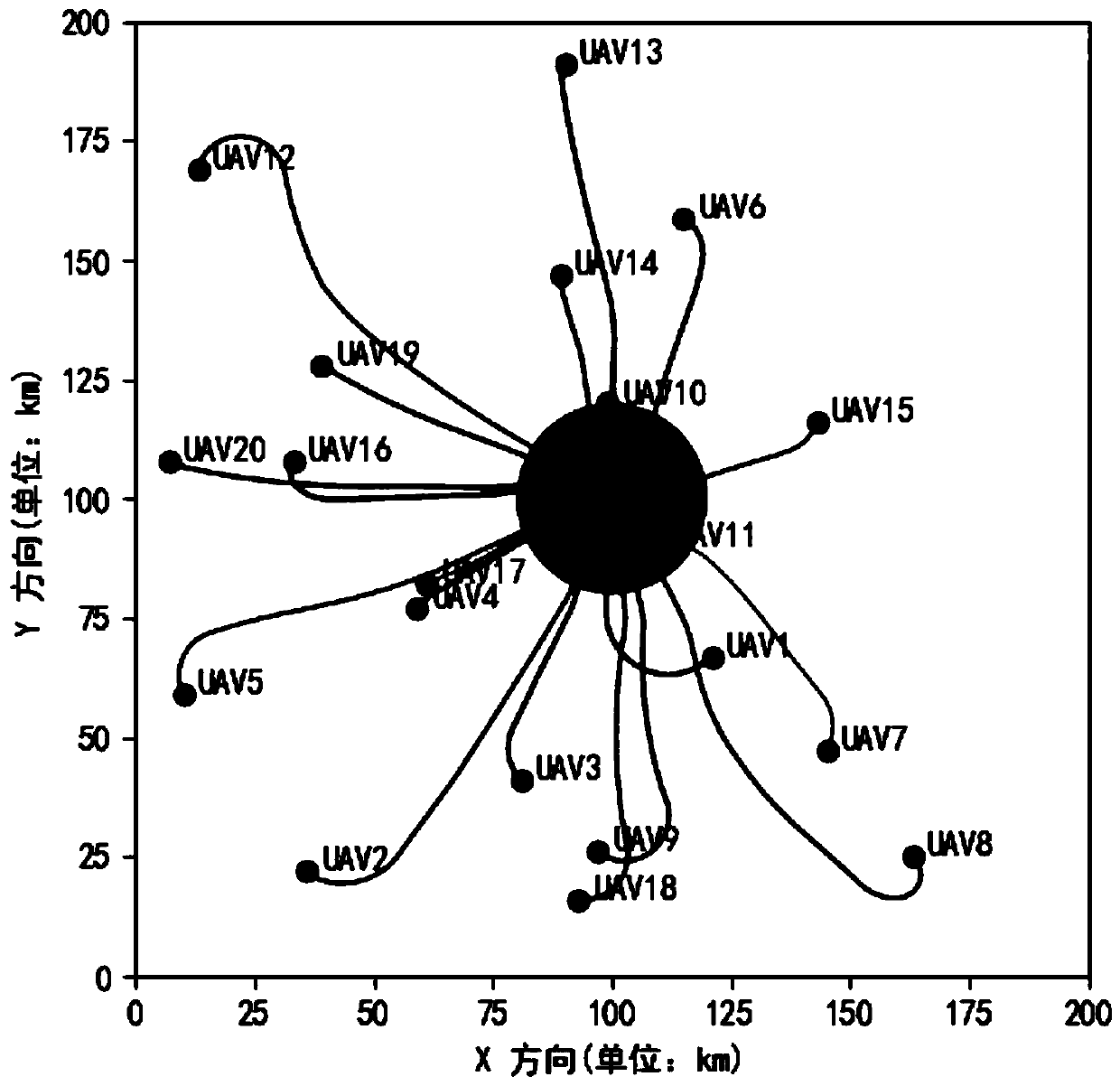
[0052] Step 1-1: Set a fixed area in the rendezvous task scene as the rendezvous area of the UAV cluster, and obtain the location information of the center point of the area (x 0 ,y 0 ), and randomly initialize M UAVs in the mission scene to obtain UAV status information, including the initial position (x i ,y i ), i=1...M and initial velocity (v xi ,v xi ), i=1...M. In this case, the scene is a continuous environment data unit of 200*200, and a fixed-sized circular rendezvous area is set in the center of the task scene, and 20 drones are randomly distributed in the scene, and the initial value of each drone is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com