


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned aerial vehicle course angle error compensation method and system based on active disturbance rejection control
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the direction of control/adjustment system, attitude control, non-electric variable control, etc., can solve the problem that the quadrotor drone's heading cannot be accurately determined, and the drone's heading angle error and other problems, to achieve the effect of improving anti-interference ability and control accuracy, and improving the state feedback rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0090] Reference attached figure 2 , the present embodiment provides an active disturbance rejection control UAV heading angle error compensation system, the system comprising:
[0091] The first acquisition unit (not shown in the figure): used to acquire the heading angle;
[0092] The quadrotor drone is equipped with various sensors, such as an electronic compass, which can be used to acquire the heading angle of the quadrotor drone in real time; in this case, the first acquisition unit acquires the heading angle from the sensors.
[0093] In another case, the data output by the sensor of the quadrotor drone cannot directly represent its heading angle, and a Kalman filter needs to be used to process the data output by the corresponding sensor to calculate the heading angle of the drone. In this case , what the first acquisition unit acquires is the heading angle of the UAV obtained after processing by the Kalman filter.
[0094] The first active disturbance rejection cont...
Embodiment 2
[0131] The embodiment provides a method for compensating the heading angle error of an unmanned aerial vehicle with ADRC, which includes the following steps:
[0132] S1. Obtain the heading angle of the drone;
[0133] S2. Obtain the new heading angle of the drone through the ADRC;
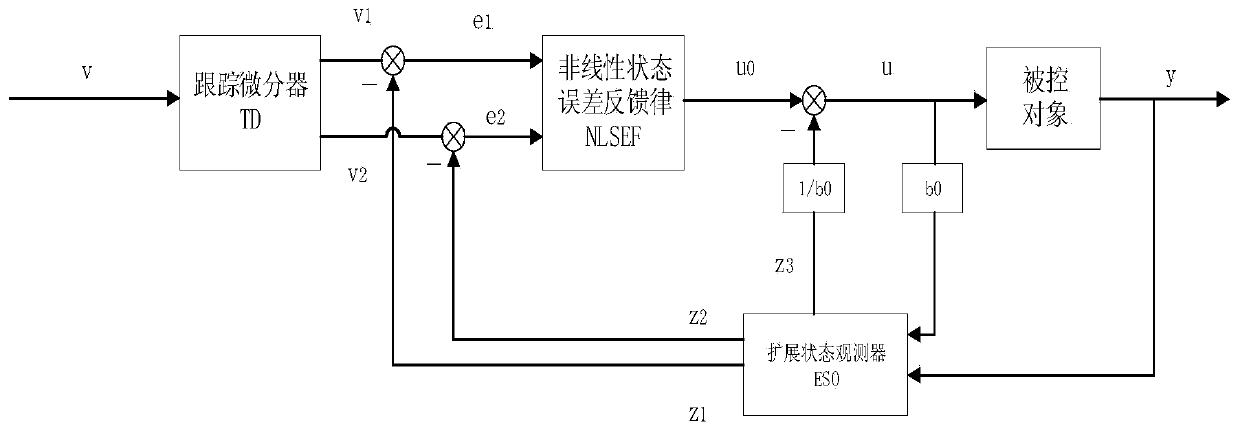
[0134] The active disturbance rejection controller includes the following structure:
[0135] A first active disturbance rejection controller, a second active disturbance rejection controller, the output of the first active disturbance rejection controller is used as the input of the second active disturbance rejection controller;
[0136] Wherein the first active disturbance rejection controller includes a first tracking differentiator and a first extended state observer;
[0137] The second active disturbance rejection controller includes a second extended state observer;
[0138] The first extended state observer and the second extended state observer are linear observers when the tracking e...
Embodiment 3
[0159] Reference attached Figure 6 , this embodiment provides a schematic structural diagram of a UAV heading angle difference compensation device 20 for active disturbance rejection control. The UAV heading angle difference compensation device 20 for active disturbance rejection control in this embodiment includes a processor 21 , a memory 22 and a computer program stored in the memory 22 and operable on the processor 21 . When the processor 21 executes the computer program, it implements the steps in the above-mentioned embodiment of the method for compensating the UAV heading angle difference by ADRC, such as steps S1 and S2. Alternatively, when the processor 21 executes the computer program, it realizes the functions of the modules / units in the above-mentioned device embodiments, for example, the first acquiring unit.
[0160] Exemplarily, the computer program can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 22 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com