Object positioning method and device, storage medium and processor
A positioning method and object technology, applied in the computer field, can solve problems such as low efficiency, achieve the effects of improving positioning efficiency, solving low efficiency, and simplifying the use process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] According to an embodiment of the present invention, an embodiment of a method for locating an object is provided. It should be noted that the steps shown in the flowcharts of the drawings can be executed in a computer system such as a set of computer-executable instructions, and, Although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
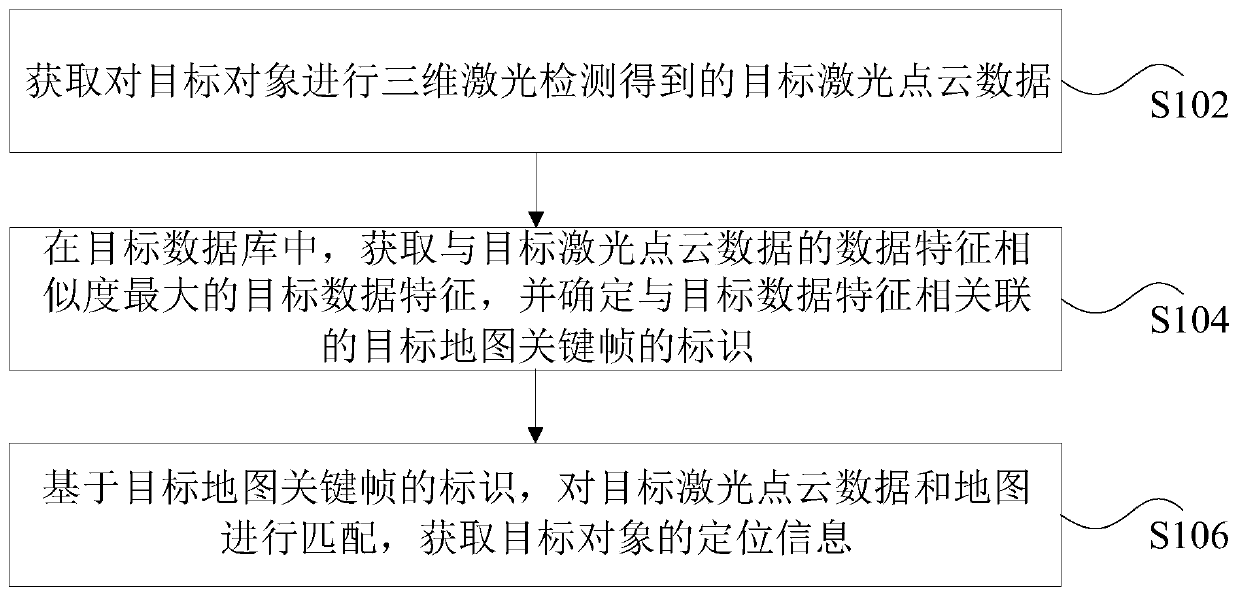
[0039] figure 1 is a flowchart of an object positioning method according to an embodiment of the present invention. Such as figure 1 As shown, the method may include the following steps:
[0040] Step S102, acquiring target laser point cloud data obtained by performing three-dimensional laser detection on the target object.
[0041] In the technical solution provided in step S102 of the present invention, the target object is an object to be positioned, which may be a robot, including but not limited to a wheeled mobile...
Embodiment 2
[0107] The solutions of the embodiments of the present invention will be illustrated below in conjunction with preferred embodiments, and the target object is a robot as an example.
[0108] In related technologies, it can be realized by initializing with a fixed point. This method needs to place the object at a physical position with known map coordinates each time, use this coordinate as the initial position, and start positioning, so that the application process It is cumbersome and complicated to operate; the related technology can also be realized by initializing at the user-specified location. Before starting positioning in this method, the user needs to point out the corresponding coordinate position on the map according to the current location of the object, but this method does not affect the user's operation. There are certain requirements for proficiency, and in the case of multi-layer maps, it is difficult to specify a three-dimensional position and direction on the...
Embodiment 3
[0162] The embodiment of the present invention also provides an object positioning device. It should be noted that the object positioning device in this embodiment can be used to implement the embodiment of the present invention figure 1 Positioning method for the object shown.
[0163] Figure 6 is a schematic diagram of an object positioning device according to an embodiment of the present invention. Such as Figure 6 As shown, the object positioning device 60 may include: a first acquisition unit 61 , a second acquisition unit 62 and a matching unit 63 .
[0164] The first acquiring unit 61 is configured to acquire target laser point cloud data obtained by performing three-dimensional laser detection on the target object.
[0165] The second acquisition unit 62 is used to acquire the target data feature with the largest similarity with the data feature of the target laser point cloud data in the target database, and determine the identification of the target map key fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com