Four-wheel steering mode for four-wheel independent drive electric automobile
A four-wheel independent drive and four-wheel steering technology, which is applied to electric vehicles, electric steering mechanisms, power steering mechanisms, etc., to achieve the effect of improving yaw motion, simple structure, and improving space utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Attached below Figure 1-4 , the embodiment of the present invention is described in detail.
[0023] This embodiment provides a four-wheel steering method for four-wheel independently driven electric vehicles, which can effectively improve the active safety performance of the vehicle, and improve the steering maneuverability and handling stability of the vehicle. And the development of four-wheel independent drive electric vehicle has proposed new possibility for the four-wheel steering of automobile.
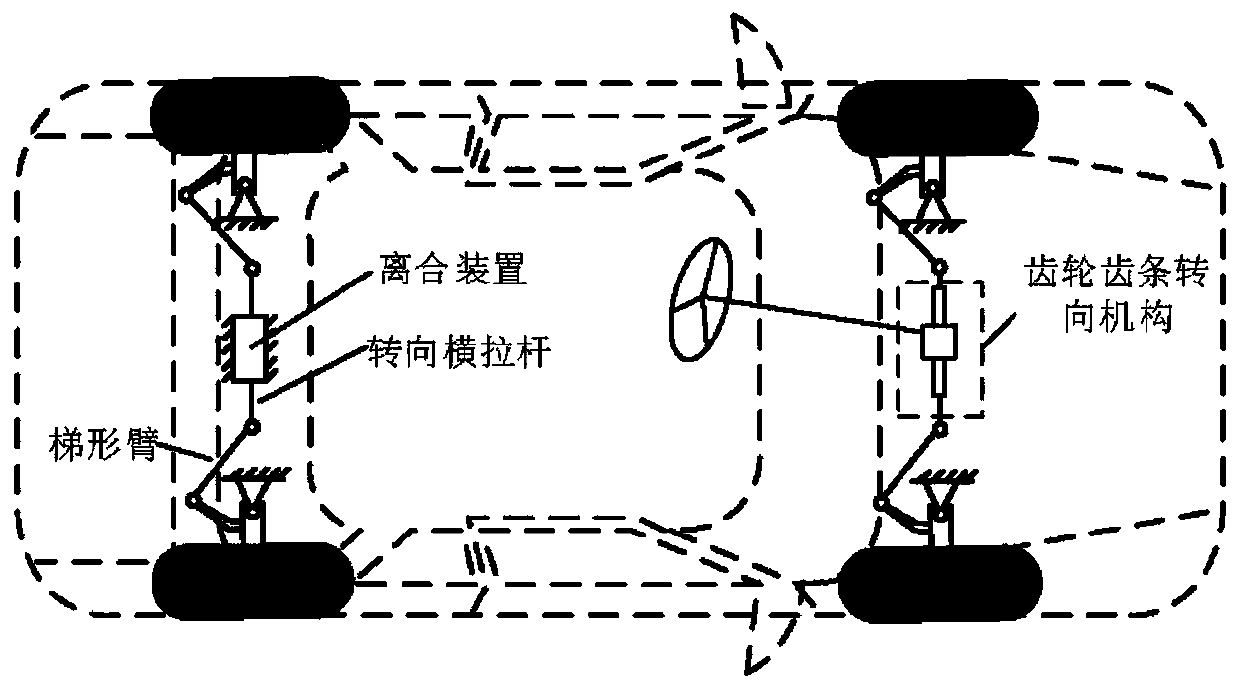
[0024] A schematic diagram of the structure of a four-wheel steering vehicle based on an electric vehicle driven by an in-wheel motor is shown in figure 1 shown.
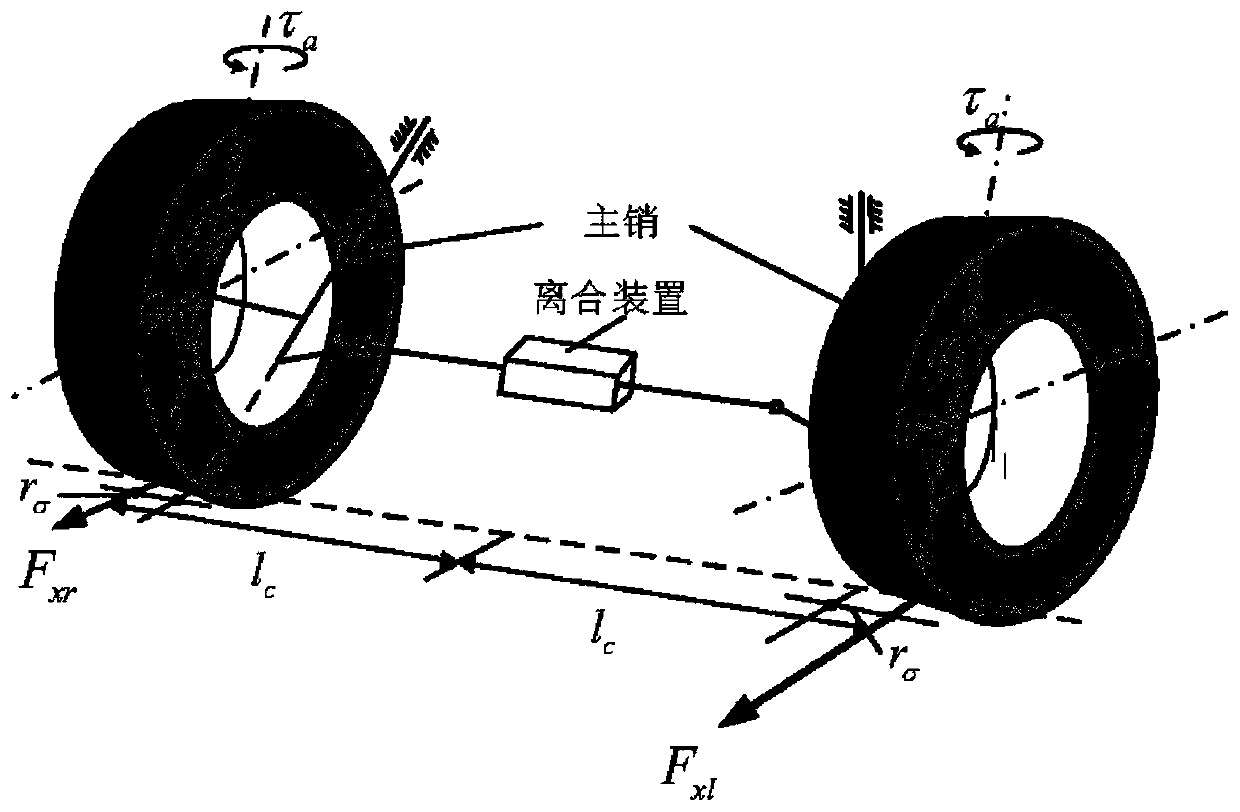
[0025] The schematic diagram of the rear wheel differential steering is as follows: figure 2 Shown, where τ a is the righting moment of the tire, l c is half of the wheelbase, r σ Kingpin offset, F xf and F xr are the driving forces of the left and right wheels respectively, T f and T r are the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com