Moving platform binocular ranging self-calibration method and device
A binocular ranging and self-calibration technology, which is applied to measuring devices, measuring distances, line-of-sight measurements, etc., can solve problems such as cumbersome processes and inability to accurately mark system errors, so as to improve measurement accuracy and facilitate engineering implementation and realization. The effect of self-calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
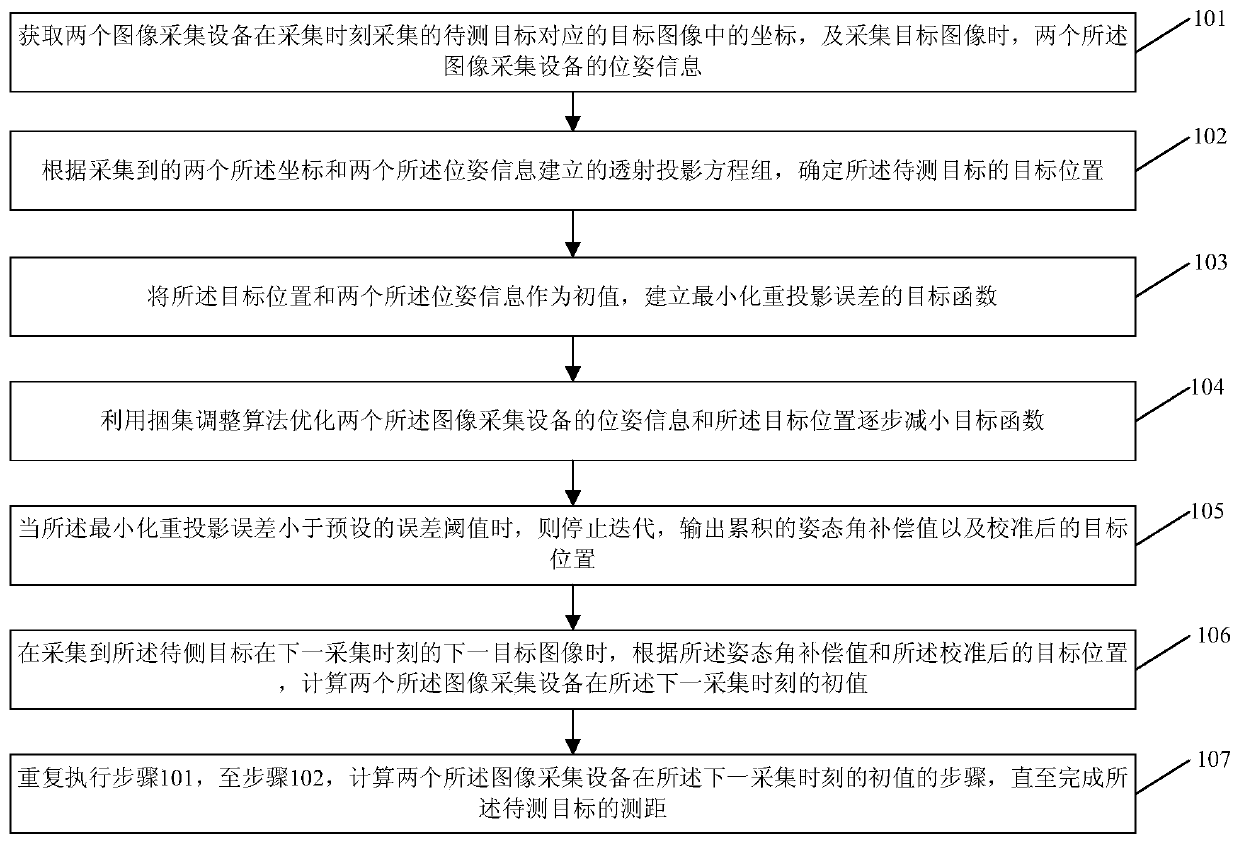
[0056] refer to figure 1 , which shows a flow chart of the steps of a self-calibration method for binocular ranging on a moving platform provided by an embodiment of the present invention, as shown in figure 1 As shown, the binocular ranging self-calibration method of the moving platform may specifically include the following steps:
[0057] Step 101: Obtain the coordinates in the target image corresponding to the target to be measured collected by the two image acquisition devices at the acquisition time, and the pose information of the two image acquisition devices when the target image is acquired;
[0058] Step 102: Determine the target position of the target to be measured according to the transmission projection equation set established by the two collected coordinates and the two pose information;
[0059] Step 103: Using the target position and the two pose information as initial values, establish an objective function that minimizes the reprojection error;
[0060] St...
Embodiment 2
[0094] refer to Figure 5 , which shows a schematic structural diagram of a binocular ranging self-calibration device for a moving platform provided by an embodiment of the present invention, as shown in Figure 5 As shown, the binocular ranging self-calibration device of the moving platform can specifically include the following modules:
[0095] The coordinate pose acquisition module 501 is used to acquire the coordinates in the target image corresponding to the target to be measured collected by the two image acquisition devices at the acquisition time, and the pose information of the two image acquisition devices when acquiring the target image;
[0096] A target position determining module 502, configured to determine the target position of the target to be measured according to the transmission projection equation set established by the two collected coordinates and the two pose information;
[0097] An objective function establishment module 503, configured to use the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com