Recognition method and system for motion behavior of legged robot based on multi-modal perception
A technology of robot motion and recognition method, applied in the field of legged robot motion behavior recognition, can solve the problems of uncertain number of recessive states, rapid transition of recessive states, reducing the accuracy of motion behavior recognition, etc., to achieve enhanced time consistency, The effect of avoiding overfitting and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
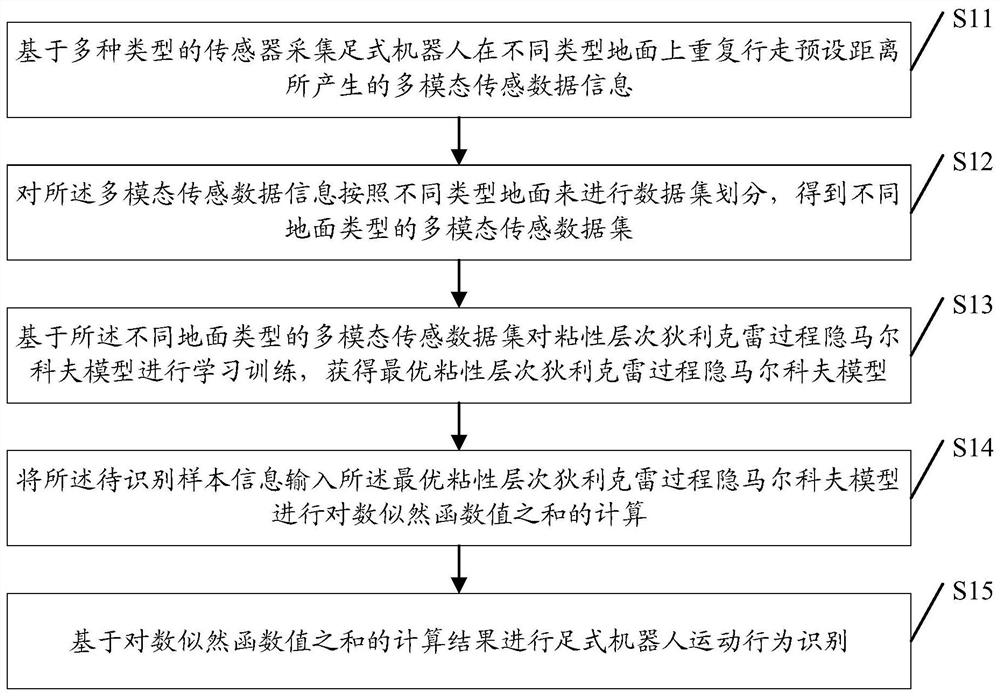
[0063] see figure 1 , figure 1 It is a schematic flowchart of the method for recognizing the movement behavior of a legged robot based on multi-modal perception in an embodiment of the present invention.
[0064] Such as figure 1 Shown, a kind of legged robot motion behavior recognition method based on multimodal perception, said method comprises:
[0065] S11: Based on multiple types of sensors, collect multi-modal sensing data information generated by the legged robot repeatedly walking a preset distance on different types of ground;
[0066] In the specific implementation process of the present invention, the multi-modal sensing data information generated by the legged robot repeatedly walking a preset distance on different types of ground based on multiple types of sensors includes: collecting based on multiple types of sensors The data information generated by the legged robot repeatedly walking the preset distance on different types of ground; the data information is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com