3D Environment Modeling Method for UAV Based on Vision-aided LiDAR
A lidar and auxiliary laser technology, applied in 3D modeling, image analysis, instruments, etc., can solve the problems of limited depth perception distance, depth direction error, inability to work, etc., to improve combat effectiveness and ensure safe flight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention is described in further detail now in conjunction with accompanying drawing.
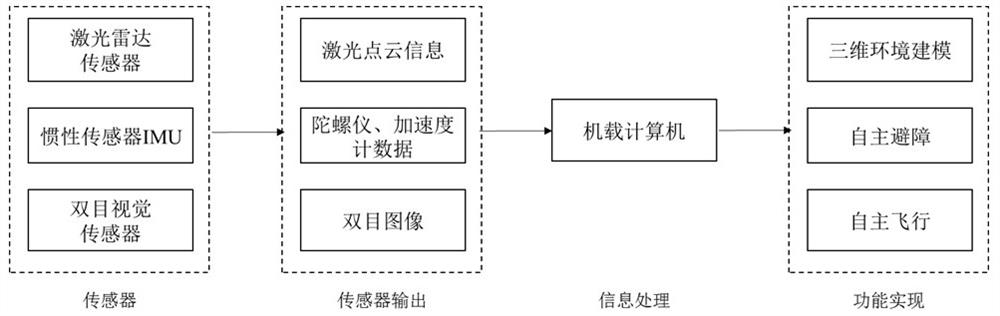
[0059] The design idea of the UAV 3D environment modeling system based on the visual aided lidar: such as figure 1 As shown, the designed UAV 3D environment modeling system collects corresponding data through sensors and transmits them to the onboard computer. The corresponding sensor data is collected and processed synchronously on the onboard computer, and relevant algorithm software programs are run to realize the 3D environment. Modeling, autonomous obstacle avoidance and autonomous flight. Among them, the laser point cloud information provided by the lidar and the binocular image information provided by the binocular camera are used to calibrate the binocular camera and the lidar respectively; the onboard computer effectively fuses the information provided by the lidar and the binocular camera to carry out Based on the design of the laser radar odometer based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com