


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Waist fixing device of lower limb exoskeleton rehabilitation training robot
A rehabilitation training and fixation device technology, which is applied in the field of medical equipment, can solve problems such as left-right swing or back-and-forth swing, complex structure, cumbersome operation, etc., and achieve the effect of low manufacturing cost, stable performance, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
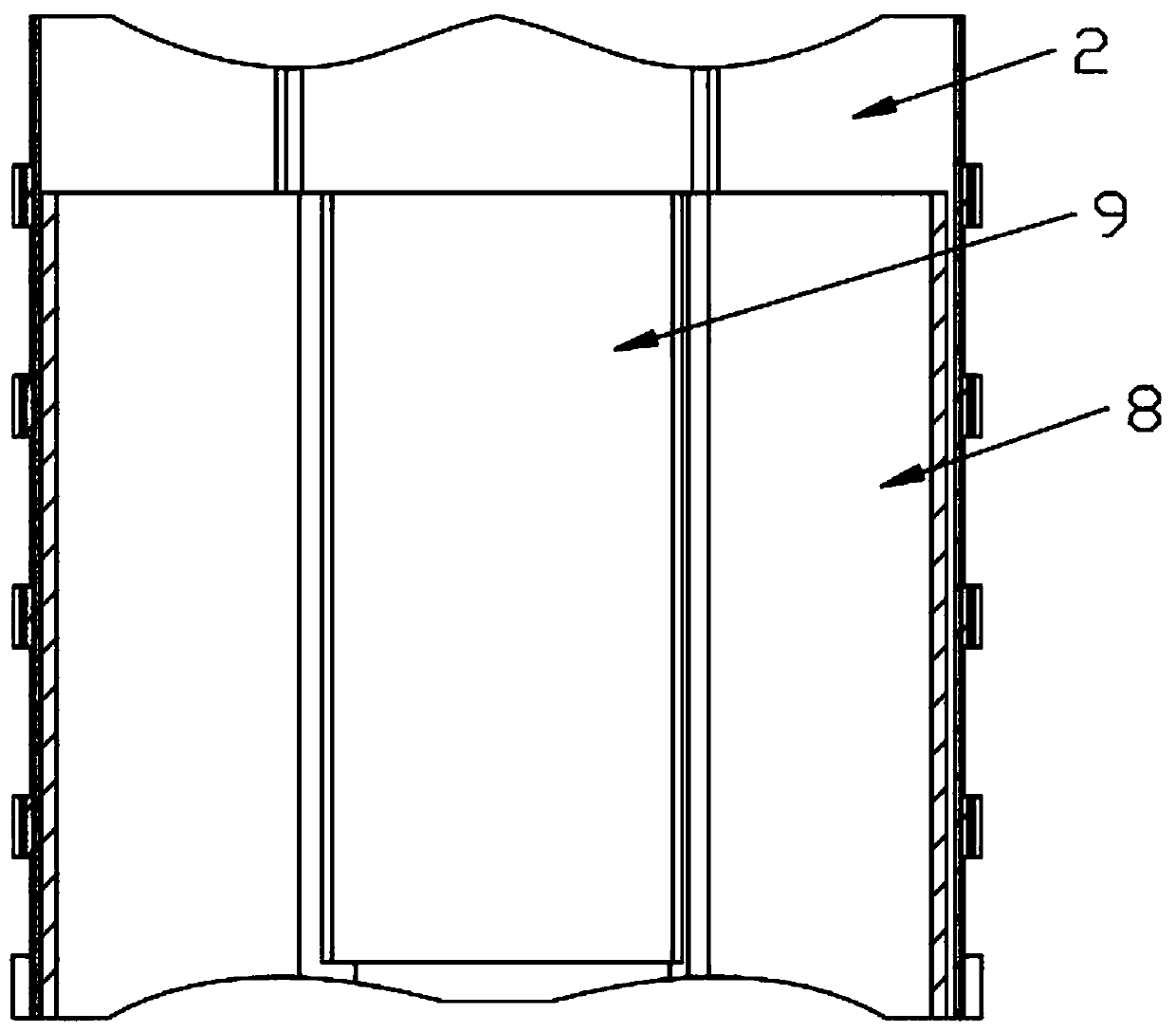
[0021] combined with figure 1 - attached figure 2 , a lower limb exoskeleton rehabilitation training robot waist fixation device, including a chest armor 1 arranged on the upper torso of a human body, a back armor 2 and a strap 3 placed on the shoulders of the human body, and a leg holder 4 fixed on the lower limbs of the human body The inner wall of the chest armor 1 and the back armor 2 is provided with a soft lining 8, and the soft lining 8 attached to the inner side of the back armor 2 is provided with a back airbag 9 on the side away from the back armor 2. The chest armor The armor 1 and the back armor 2 are fitted and connected to each other through the armor restraint belt 12. The outer wall of the chest armor 1 and the back armor 2 are symmetrically provided with a strap installation buckle 303 near the upper port. The straps 3. The two ends are detachably connected to the strap mounting buckle 303, and both sides of the lower end of the back armor 2 are fixed with f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com