Mechanical arm for ophthalmic surgery training
A technology of ophthalmic surgery and robotic arm, which is applied in the field of intelligent manufacturing, can solve problems such as failure of ophthalmic surgery and high mental stress of ophthalmologists, and achieve the effect of training the ability to operate the robotic arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
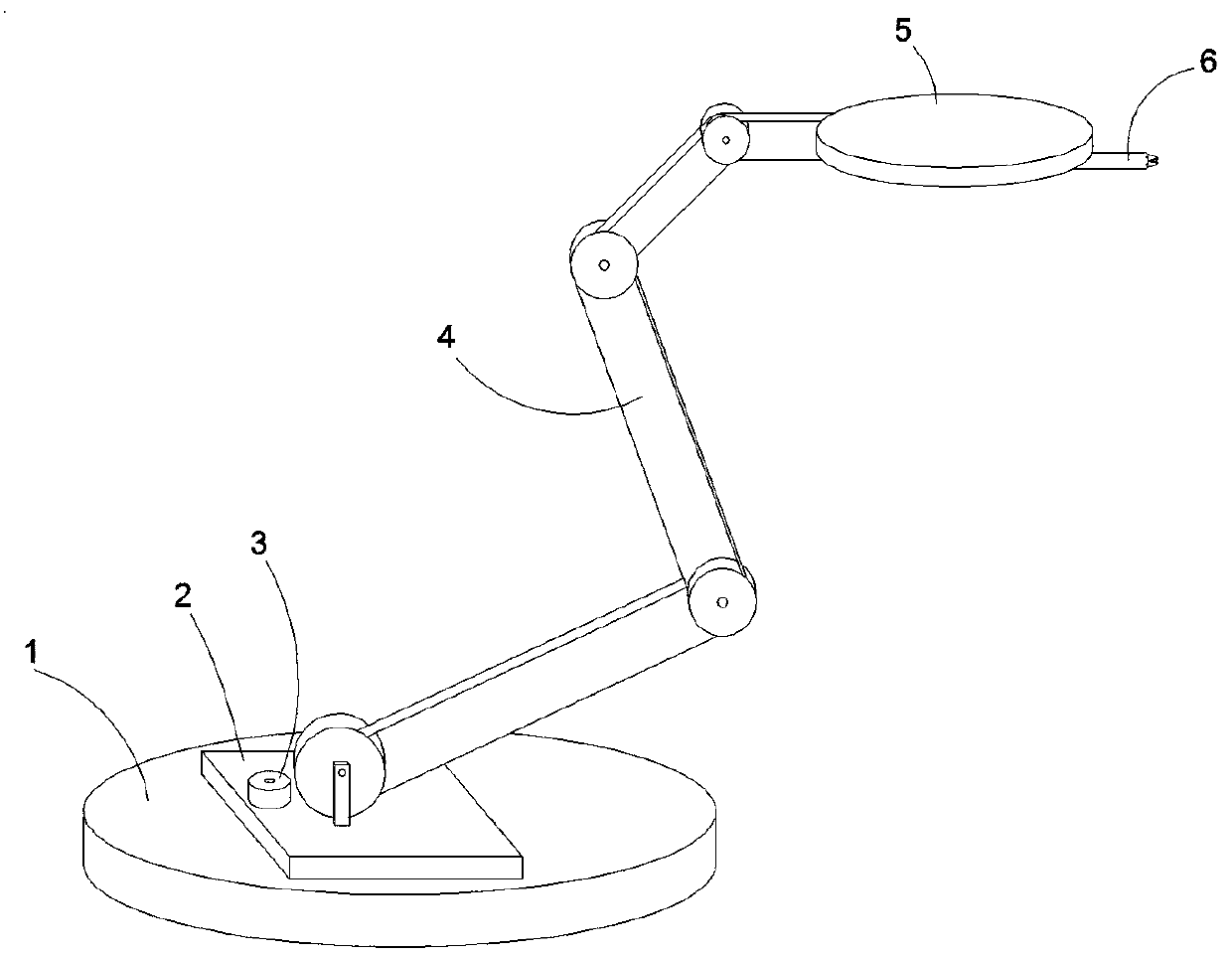
[0037] A mechanical arm for eye surgery training, its structure is like Figure 1-Figure 6 As shown, the operating system is included, and the operating system is connected to the operating system. The operating system includes a support device. The support device is provided with a multi-degree-of-freedom manipulator 4, and one end of the multi-degree-of-freedom manipulator 4 is connected with a training device 5. The end of the training device 5 away from the multi-degree-of-freedom mechanical arm 4 is provided with a surgical device 6; the support device includes a support base 1, and the bottom end of the support base 1 is provided with a plurality of support feet that are axisymmetric to the support base 1, and the support base 1 is provided with Rotating base 2. Rotating base 2 can be circular or other shapes. Rotating base 2 is provided with rotating motor 3, rotating motor 3 is connected with a reduction wheel arranged on the center of rotating base 2, rotating motor 3 i...
Embodiment 2
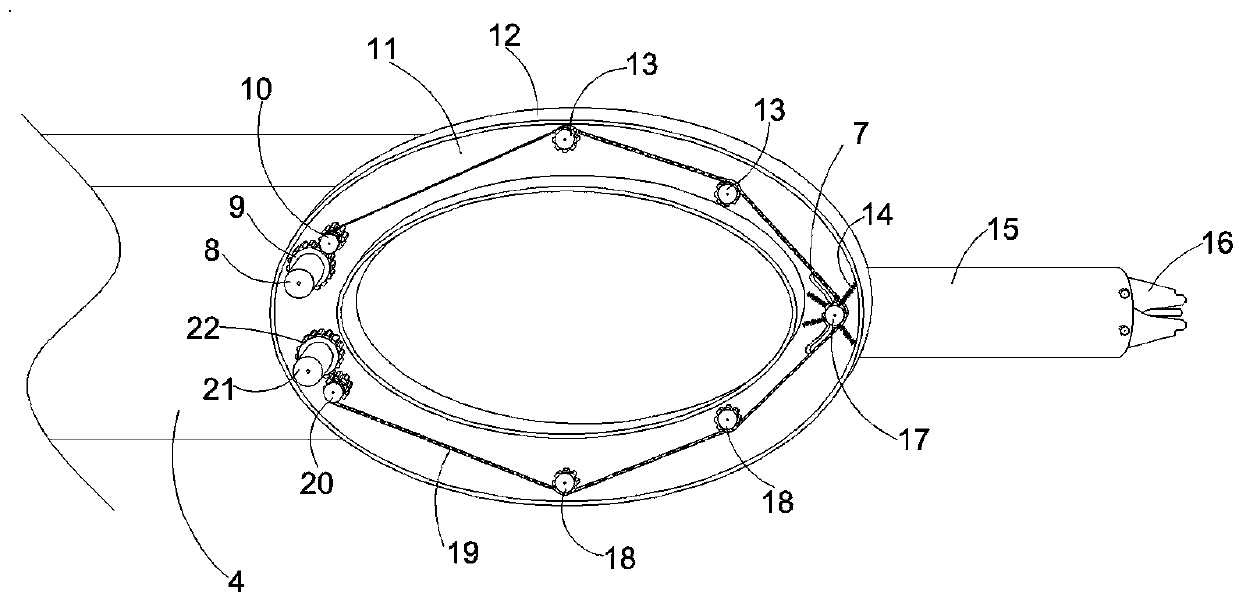
[0044] A mechanical arm for ophthalmic surgery training. The difference from Embodiment 1 is that: the arc-shaped hole 7 is provided with rolling teeth on the inner surface, and the matching grooves 26 are provided with matching teeth that mesh with the rolling teeth. Two matching grooves 26 They are connected to form a meshing groove; the polarizing column 17 and the arc-shaped hole 7 are matched with a gear and rack, which can more accurately realize the purpose of intelligently reminding the ophthalmologist of operating errors.
Embodiment 3
[0046] A mechanical arm for ophthalmic surgery training. The difference from the first embodiment is that: the first rotating motor 8 and the second rotating motor 21 are both equipped with current sensors, and the current sensors are connected with the current analysis module arranged in the computer; No auxiliary fixing spring 14 is provided on the upper polarization post 29 and the lower polarization post 27.
[0047] When in use, start the rotating motor 3 by operating the operating lever of the support base. The rotating motor 3 drives the reduction wheel on the center of the rotating base 2 to rotate, and drives the rotating base 2 to slowly rotate so that the ophthalmic microscope 33 is close to the direction of the patient's eyes; operate the mechanical arm to operate Lever; makes the multi-degree-of-freedom mechanical arm 4 quickly approach the patient’s eye position. When the microscope display shows that the ophthalmic microscope 33 is close to the patient’s eye, the op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com