Robot frogman and palm assembly
A component and palm technology, applied in the field of robotics, can solve the problems of inconvenient installation and use, slow response speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
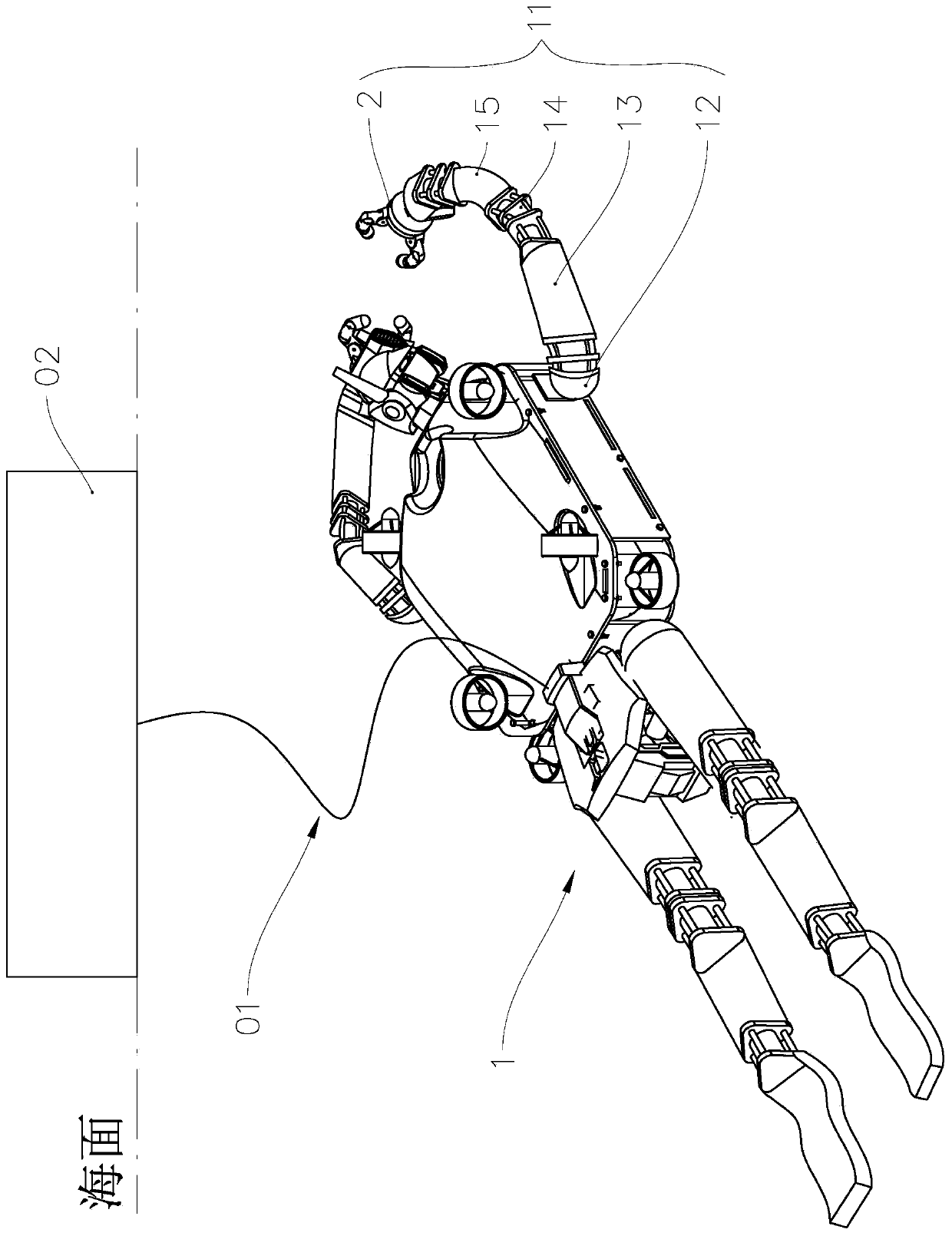
[0030] see figure 1 , the robot frogman 1 of the present invention includes a fuselage 10 and a humanoid robotic arm 11 installed on the fuselage 10, the humanoid robotic arm 11 includes a shoulder joint 12, a big arm 13, an elbow joint 14, a small arm 15 and a The palm assembly 2 that the wrist joint is connected with the end of the forearm 15 . During the working process, it communicates with the transfer station 02 on the water surface through the optical fiber 01.
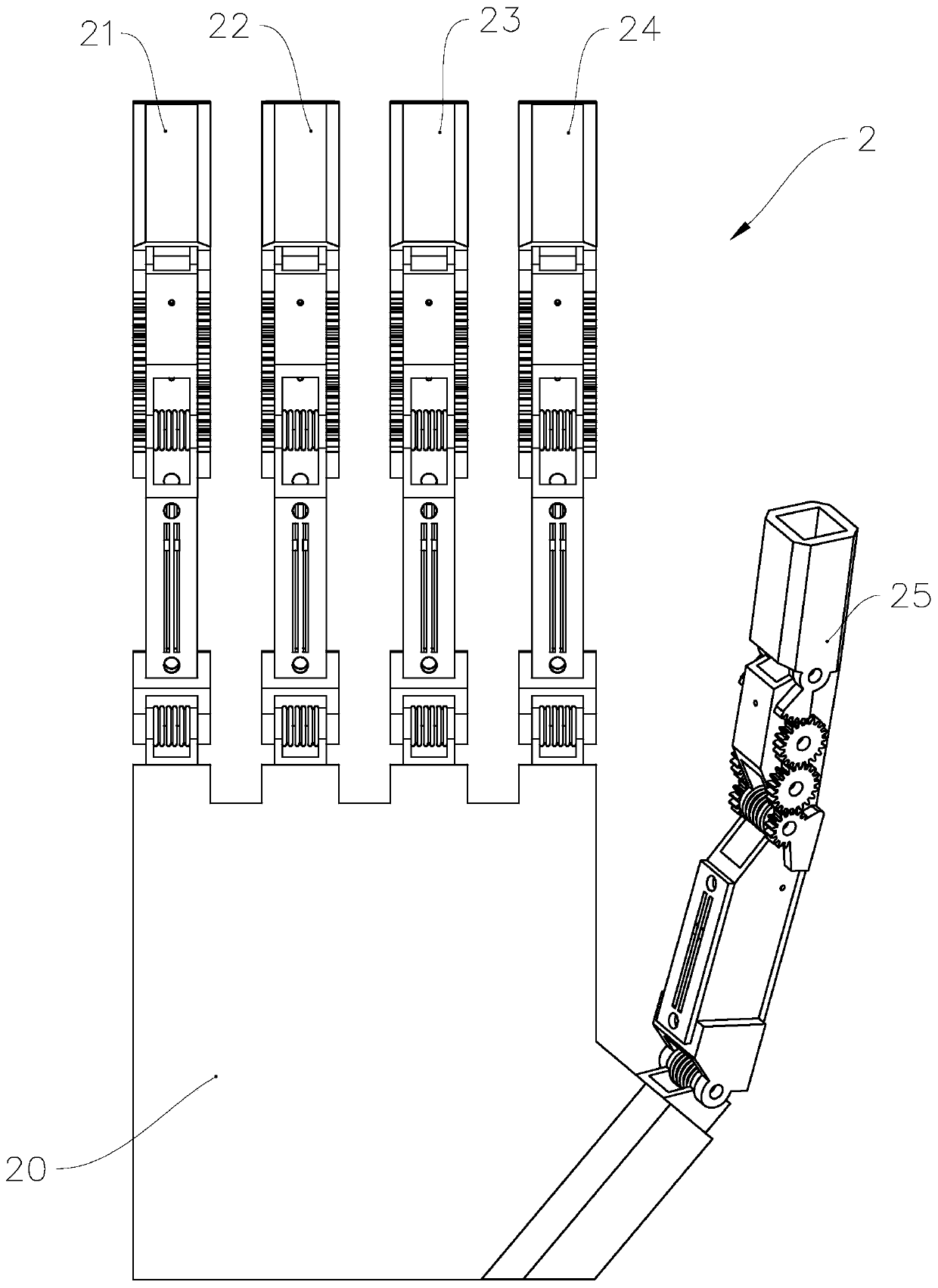
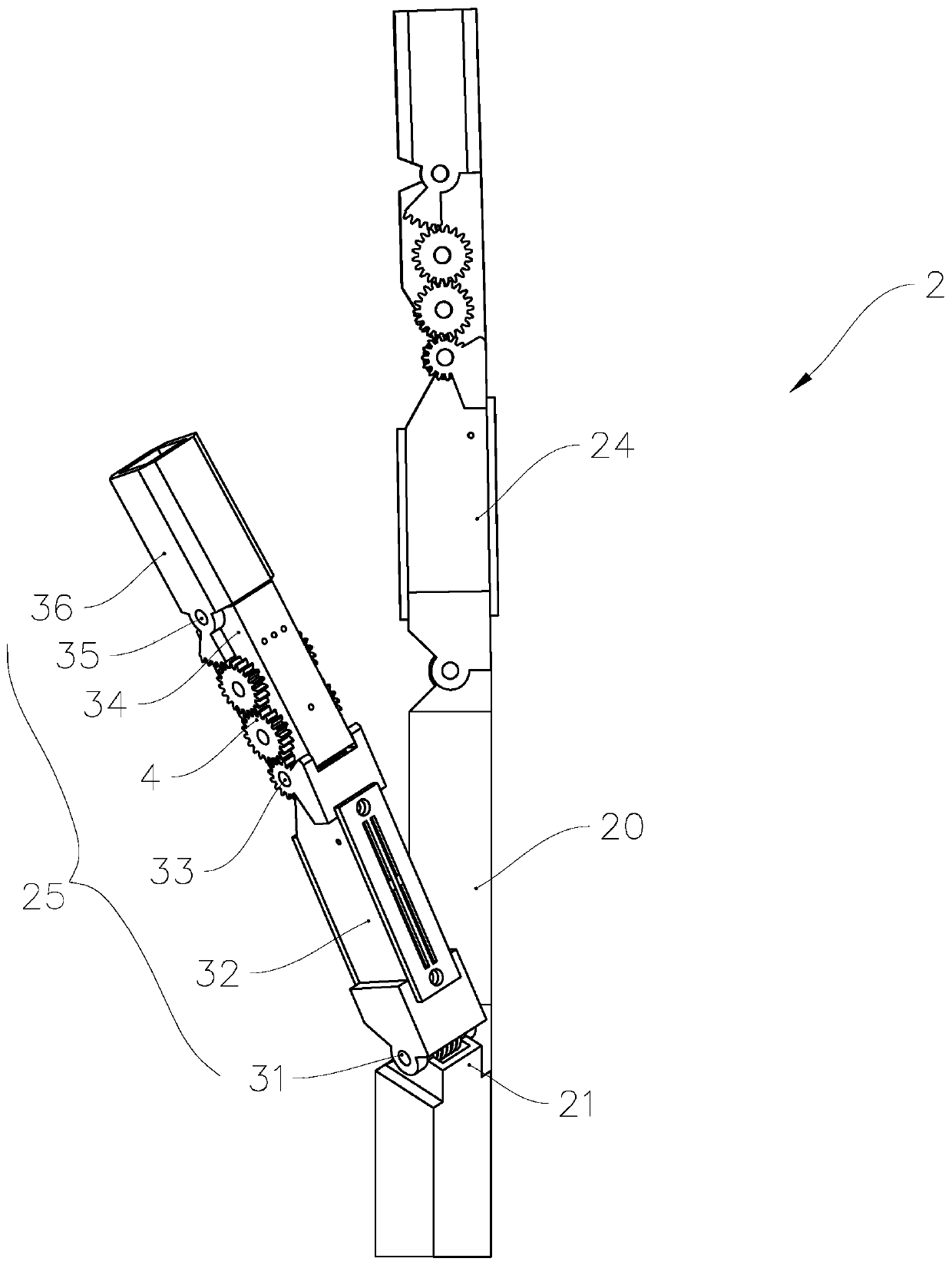
[0031] see Figure 2 to Figure 8 The palm assembly 2 includes a palm seat 20 and fingers 21 , 22 , 23 , 24 and 25 hinged on the edge base 21 of the palm seat 20 . Such as figure 2 and image 3 As shown, the axis of the hinge axis of the fingers 25 that constitute the thumb and the edge base 21 is deflected inward at a certain angle relative to the hinge axes of the other four fingers that are hinged with the edge base 21, so as to simulate the human hand when grasping an object. The closed state of the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com