Mobile robot path planning method
A mobile robot and path planning technology, applied in instruments, road network navigators, navigation, etc., can solve problems such as insufficient stability and positioning accuracy, achieve accurate position prediction results, reduce complexity and depth, increase stability and The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
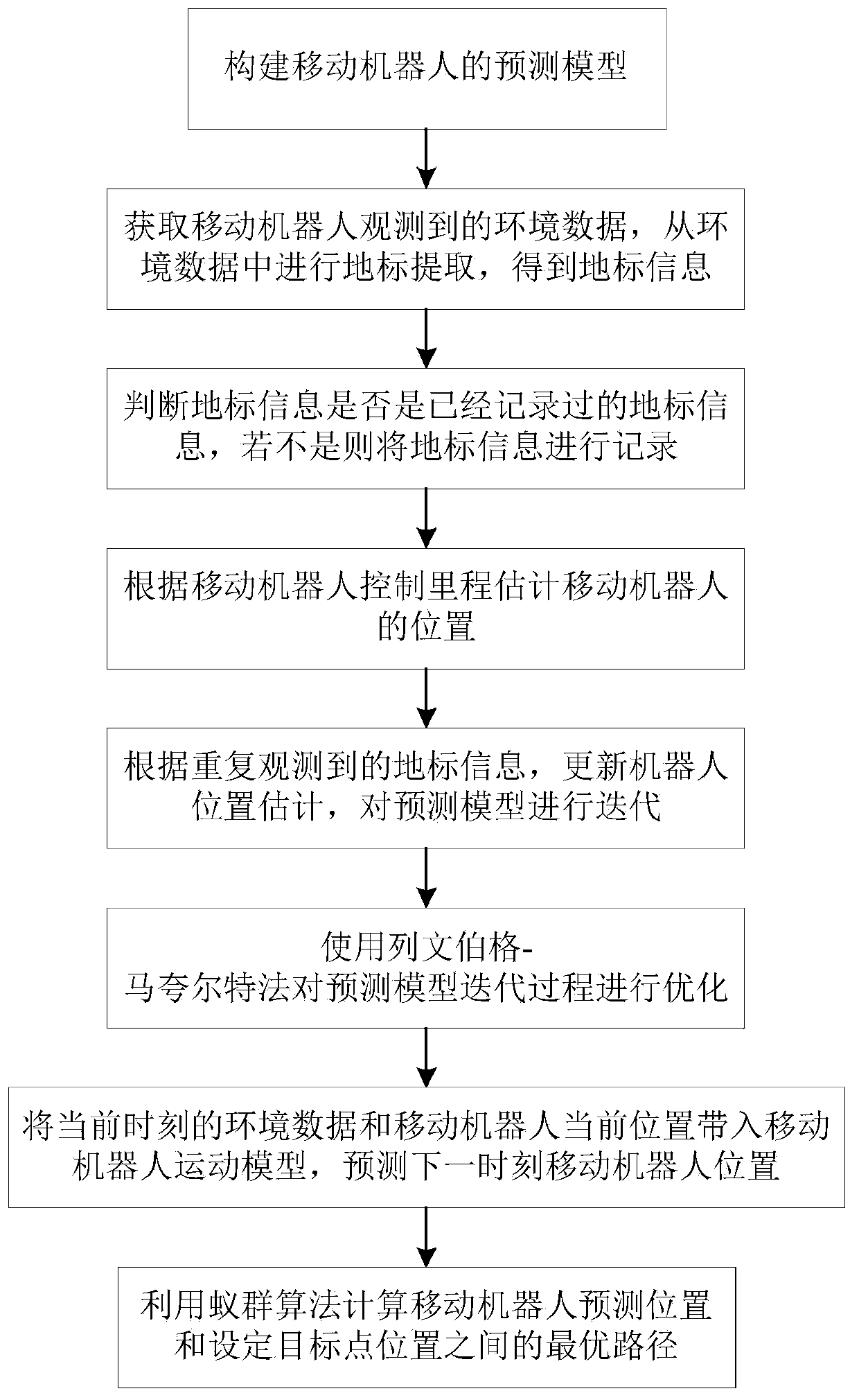
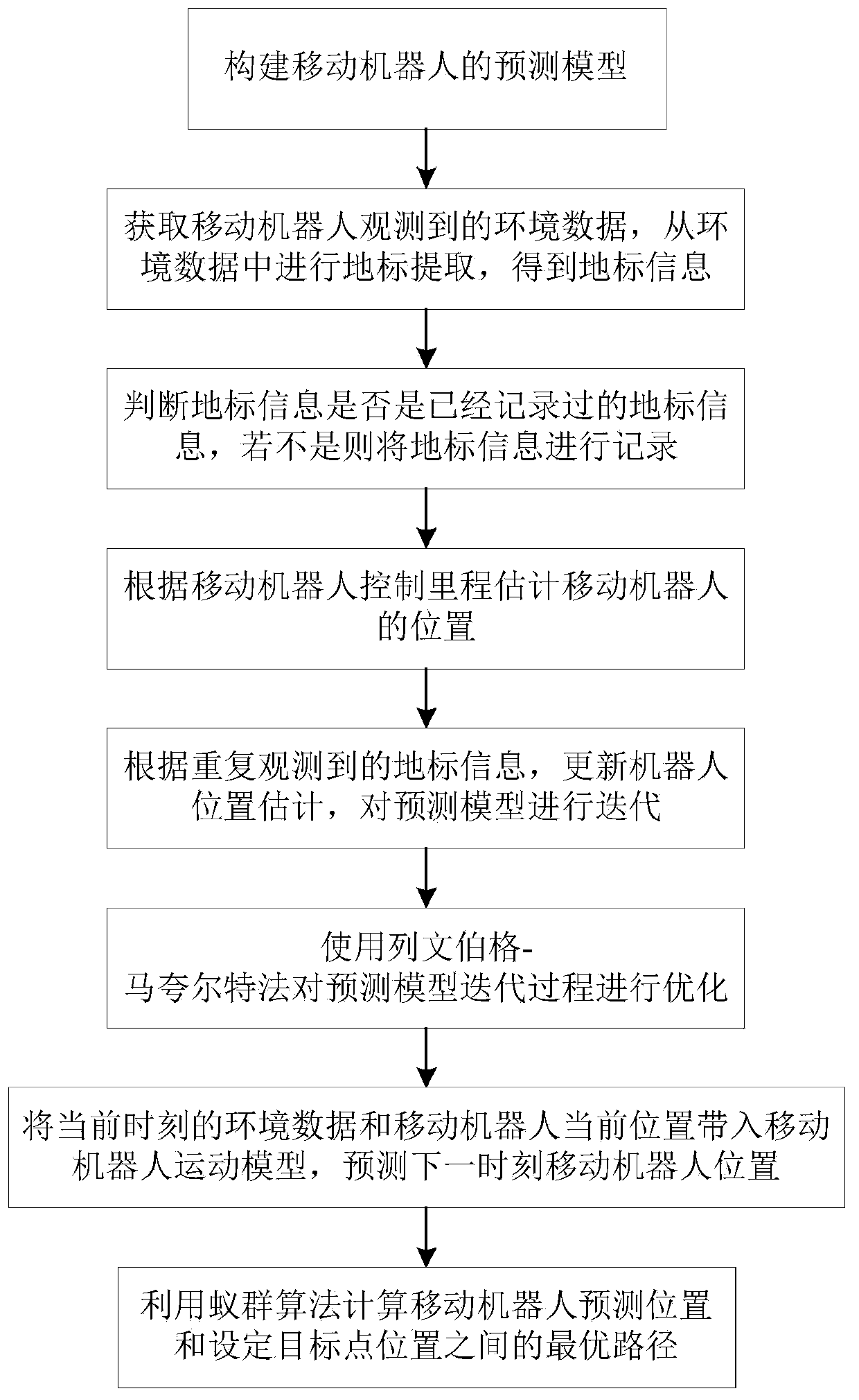
[0065] As an implementation manner, estimating the position of the mobile robot according to the current mileage of the mobile robot includes:
[0066] Calculate the covariance of the position of the mobile robot, the covariance of the landmark, and the covariance between the mobile robot and the landmark and the landmark, and construct the covariance matrix;
[0067] Jacobian matrix for predicting mobile robot prediction model
[0068] The covariance matrix is updated according to the control mileage of the mobile robot and the Jacobian matrix of the prediction model to predict the current position of the mobile robot.
[0069] Covariance is used in probability theory and statistics to measure the overall error of two variables. The covariance of two variables provides a measure of the degree of correlation between these two variables. The covariance matrix can be used to express the probability density of multi-dimensional random variables, so that the study of multi-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com