A robot device for interventional surgery operated by medium and long-distance remote control
A technology of interventional surgery and remote control, applied in the field of interventional surgery robotic devices, can solve the problems of piercing the inner wall of the human body, single-point pressure concentration, and lack of monitoring of interventional devices, so as to achieve the effect of improving monitoring accuracy and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] The interventional surgical robot device operated by medium and remote remote control of the present invention will be described in detail below with reference to the drawings and embodiments.
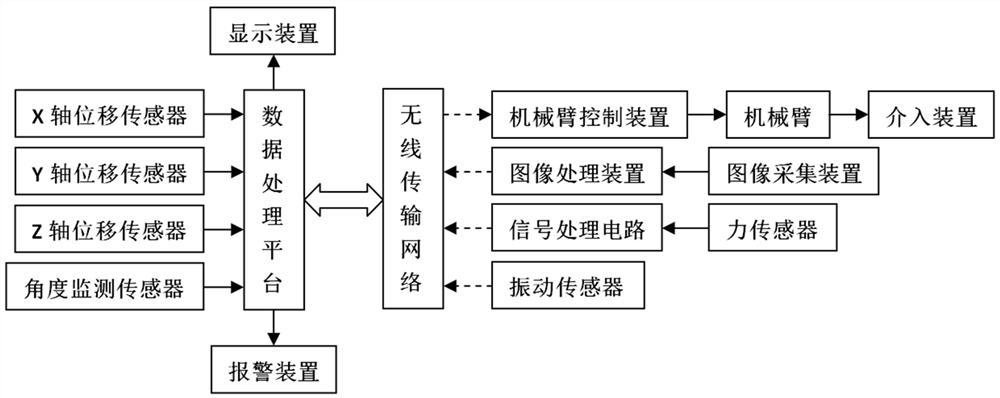
[0029] Such as Figure 1-2 As shown, the interventional surgery robotic device provided by the present invention includes an X-axis displacement sensor, a Y-axis displacement sensor, a Z-axis displacement sensor, an angle detection sensor, a display device, a data processing platform, an alarm device, a wireless transmission network, A control device for a robotic arm, a robotic arm, an interventional device, an image processing device, an image acquisition device, a signal processing circuit, a force sensor 6 , a vibration sensor and a handheld device 1 .
[0030] Among them, the medical personnel hold the hand-held device 1, and the displacement sensor placement area 2 is set in the hand-held device 1. The X-axis displacement sensor, the Y-axis displacement sensor and the Z-ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com