Method for solving motion control of redundant mechanical arm
A motion control and solution technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
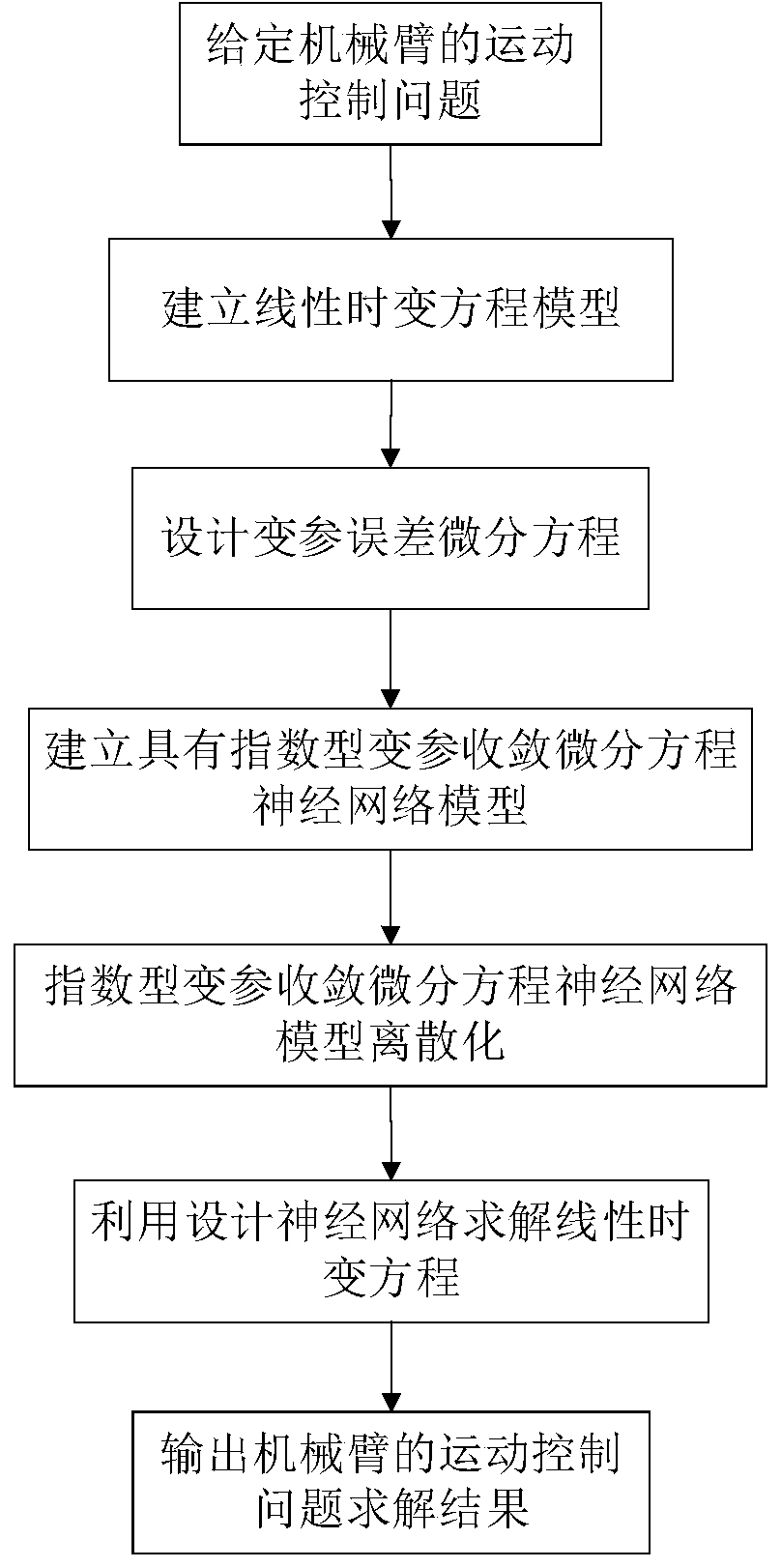
[0057] Such as figure 1 As shown, this embodiment provides a solution to the motion control of a redundant robotic arm, including the following steps:
[0058] S1: Build a redundant manipulator as the controlled object, model the motion control problem of the manipulator based on the given trajectory of the end of the manipulator, and convert it into a linear time-varying equation;
[0059] The specific implementation steps of step S1 are: based on the motion control problem of a given robotic arm, the relationship between the end position of the robotic arm and each joint is specifically described as the following equation:
[0060] r(t)=F(θ(t)) (1)
[0061] Among them, θ(t)=[θ 1 (t) ... θ n (t)] T ∈ R n , n is the degree of freedom of the manipulator; r(t)=[x(t) y(t) z(t)] T ∈ R 3 is the end position of the manipulator; F(·):R n →R 3 is the relationship between the joint angle of the manipulator and the end position;
[0062] The equation for deriving formula (1) i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com