Variable-rigidity soft module with bionic glass sponge skeleton structure and clamp holder
A skeleton structure and software module technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of poor variable stiffness and other problems, and achieve the effects of light weight, wide range of variable stiffness, excellent deformation ability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
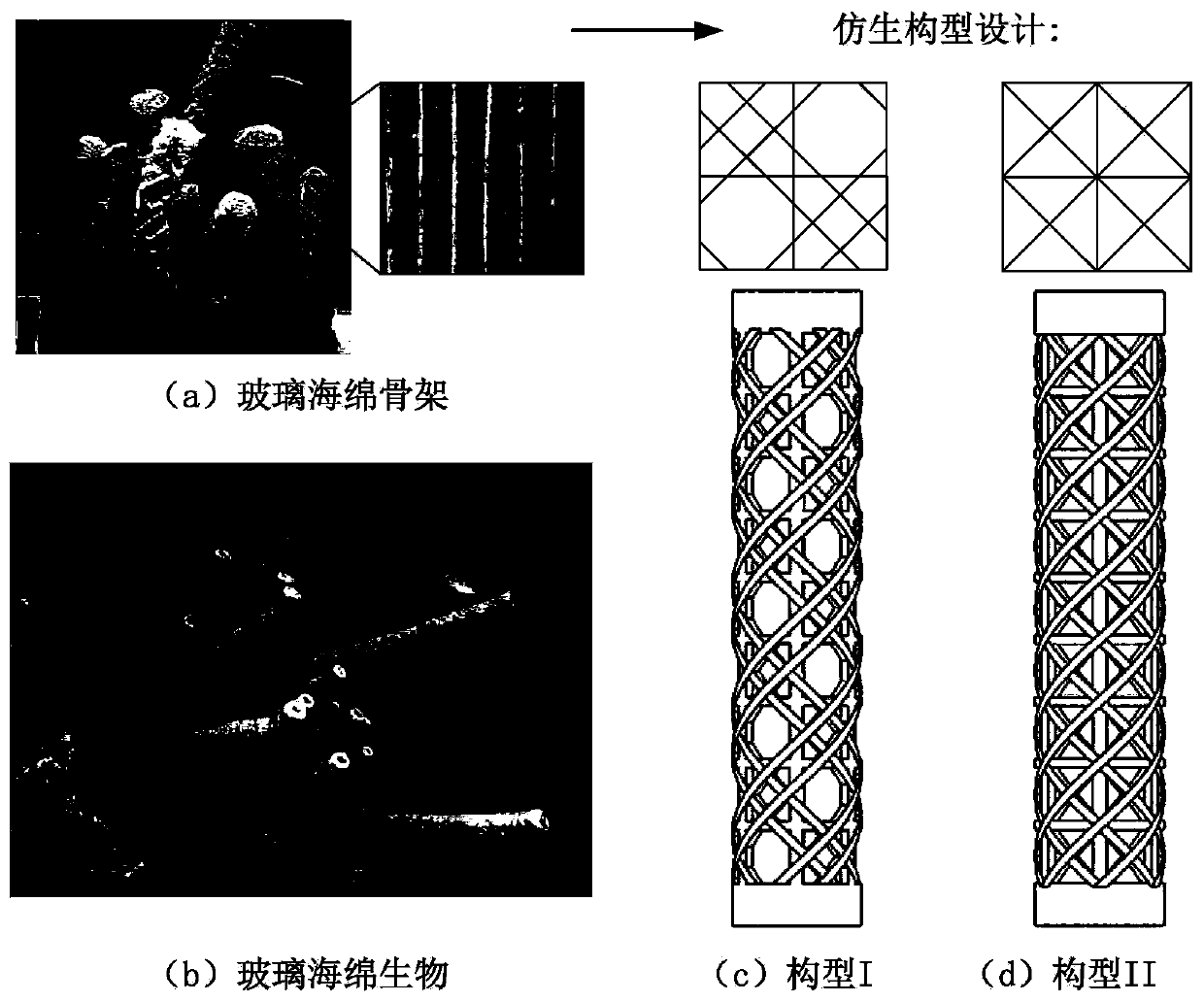
[0036] Specific implementation mode one: as Figures 1 to 6, the variable stiffness software module imitating a glass sponge skeleton structure according to the embodiment of the present invention includes at least three air cavities 1, a variable stiffness structure 2, three air tubes 3, a rigid base 4, a flexible heating layer 5, an elastic body 6 and a central Constraining layer 7; the variable stiffness structure 2 is set on the flexible heating layer 5, and the flexible heating layer 5 is provided with a central restricting layer 7, and the elastic body 6 is wrapped on the side wall and both ends of the variable stiffness structure 2 and filled in the flexible heating layer In the layer 5, three air cavities 1 are arranged on the elastic body 6 located in the flexible heating layer 5, and the open ends of the three air cavities 1 communicate with the corresponding air tubes 3, and the air tubes 3 are connected to the rigid base 4 and the ends of the air tubes 3 One end is...
specific Embodiment approach 2
[0047] Specific implementation mode two: as Figure 7 Shown, a kind of clamper, described clamper comprises three above-mentioned variable stiffness soft body modules and a base plate, three variable stiffness soft body modules are respectively fixed on the rigid base plate by respective rigid bases, the rigidity of the variable stiffness soft body modules The position and angle of the base connected to the bottom plate can be adjusted to accommodate objects of different sizes. The variable stiffness software module includes a variable stiffness mechanism 2 , a rigid base 4 , a flexible heating layer 5 , a silicone body 6 , and a central restriction layer 7 . The three variable-stiffness software modules are respectively fixed on the rigid base plate through the base, and the position and angle of the module base connected to the base plate can be adjusted to accommodate items of different sizes.
[0048] The software modules can be assembled in parallel to form a gripper, an...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Elastic modulus | aaaaa | aaaaa |
| Elastic modulus | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com