Active vehicle continuous tracking device, system and method
A tracking device and active technology, applied in the field of behavior trajectory analysis and target tracking, can solve the problems of incomplete information, inaccurate positioning, and inability to achieve full-time active tracking and positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
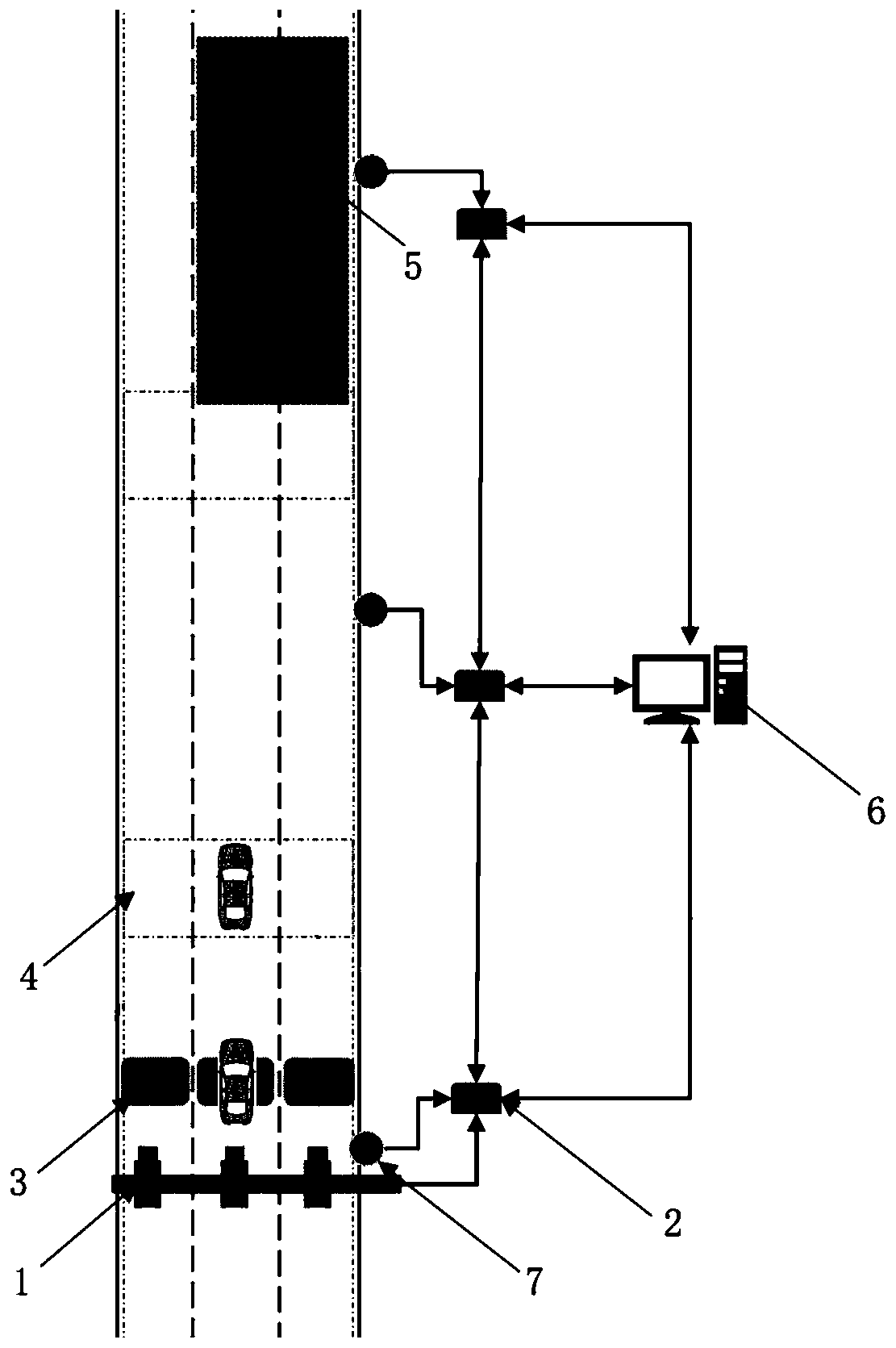
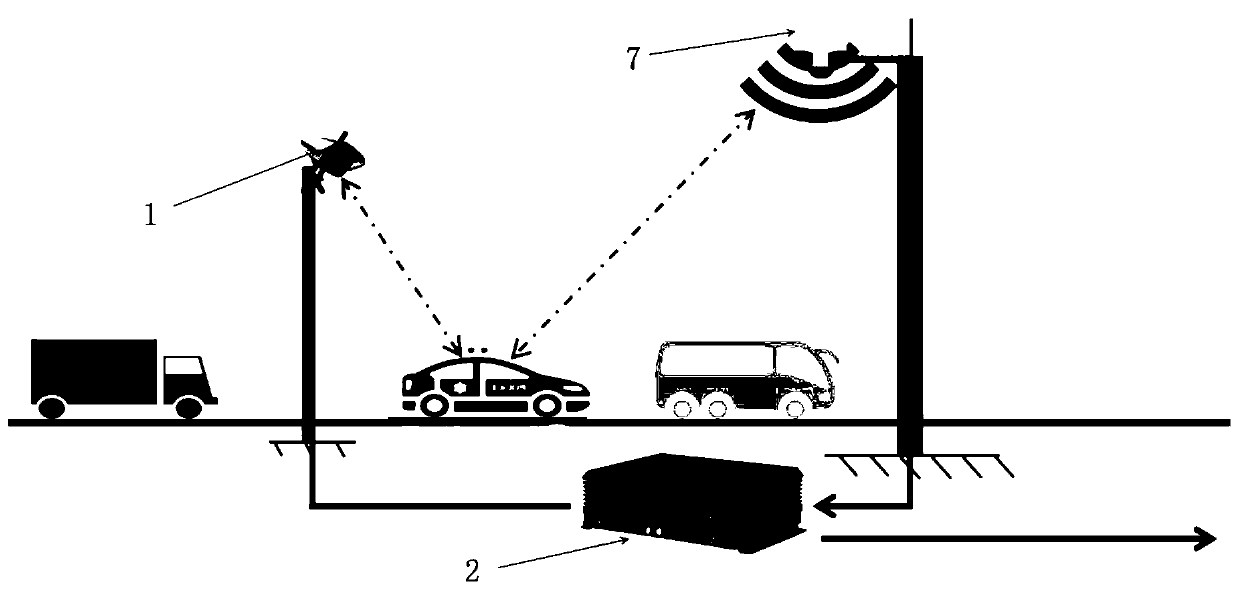
[0027] This embodiment discloses an active vehicle continuous tracking device, which is characterized in that the vehicle continuous tracking device includes: a radar sensor, a vehicle capture camera 1, a data acquisition processor 2, and the radar sensors are arranged at equal intervals on the road side On the side or in the middle of the road, the vehicle capture camera 1 is set above the lane, and a corresponding number of vehicle capture cameras 1 are set according to the number of lanes. The data acquisition processor 2 is installed at the same point as the radar equipment and installed on the side of the road. The edges are respectively connected to the radar sensor and the vehicle capture camera 1 through the network. The radar sensor collects the raw data of all stationary and moving targets in the radar detection area by scanning, and sends it to the data acquisition processor 2 for processing. The vehicle dynamic data is obtained by data analysis and processing, and th...
Embodiment 2
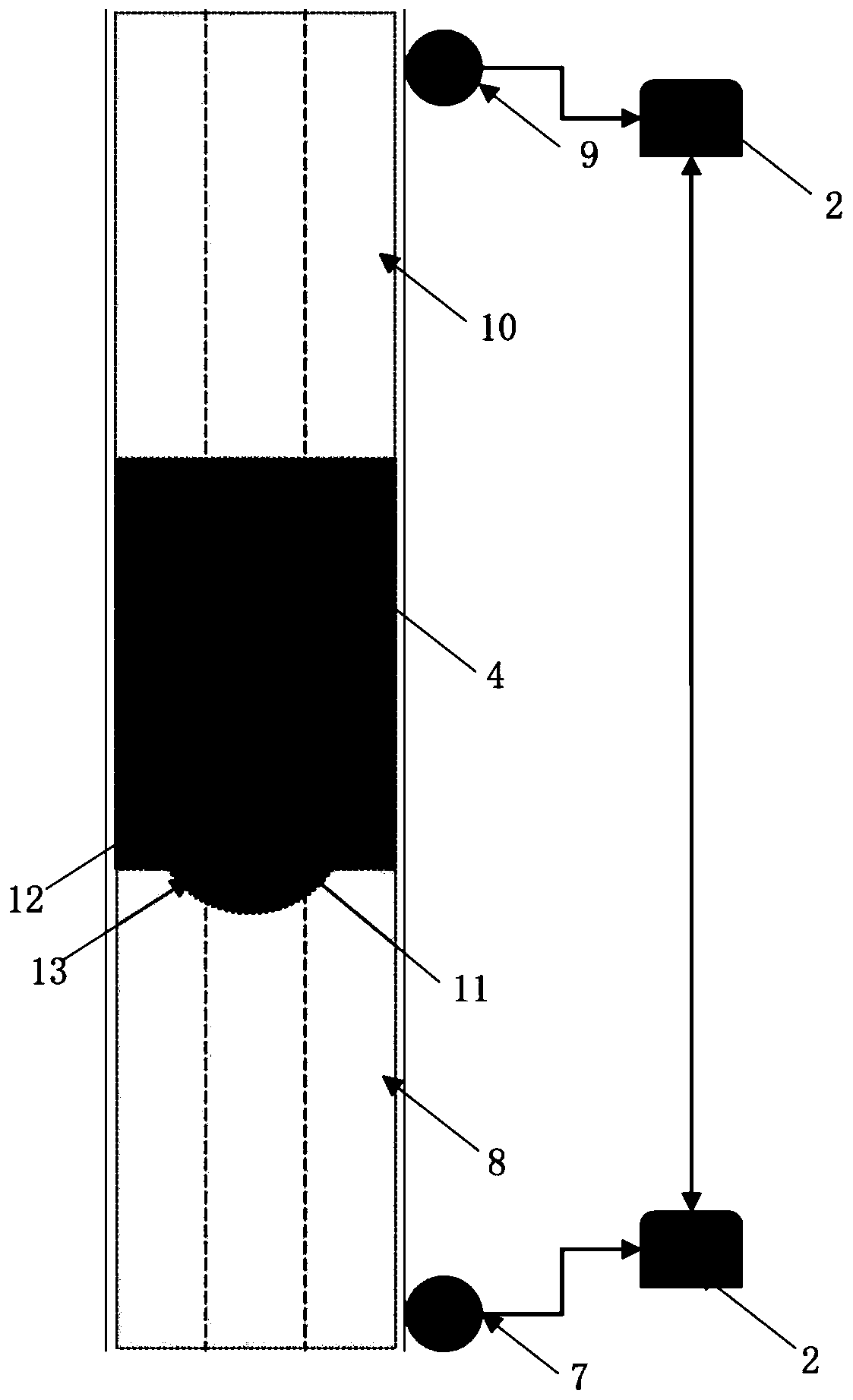
[0032] This embodiment discloses an active vehicle continuous tracking system, which is characterized in that the system includes: a vehicle occlusion tracking compensation module, a radar data processing synchronization trigger capture module, a vehicle ID identification number correction module, and a vehicle continuous tracking information transfer interaction Module, vehicle complete data information loss, secondary calibration information backtracking module, dynamic information and feature information binding and fusion module, the vehicle occlusion tracking compensation module is based on the change rule of the first five point trace information of the vehicle’s self-lost information after the radar scan The current movement law of the vehicle and the logic of inertial navigation are used to simulate point traces and dynamic information compensation. When the vehicle is in the vehicle occlusion area 5 and cannot be effectively scanned by the radar and obtain the dynamic in...
Embodiment 3
[0045] This embodiment discloses an active vehicle continuous tracking method, which is characterized in that the method is: using a radar sensor to collect raw data of all stationary and moving targets in the radar detection area, and send it to the data acquisition processor 2 Carry out data analysis and processing to obtain vehicle dynamic data, and follow the pre-set rules to track and monitor vehicles entering the radar detection range, and generate a unique ID number corresponding to the vehicle.
[0046] After the vehicle capture camera 1 is connected to the data acquisition processor 2, when the radar sensor detects that a vehicle enters the preset trigger capture area 3, the data acquisition processor 2 will carry the unique ID number corresponding to the vehicle The dynamic tracking information is used as a trigger signal and is sent to the vehicle capture camera 1 corresponding to the trigger area for synchronous trigger capture. The captured pictures are numbered by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com