Robot path planning method integrating artificial potential field and logarithm ant colony algorithm
A technology of artificial potential field and ant colony algorithm, which is applied in the direction of instruments, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of complex calculation, increase of the shortest path of the robot, waste of time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0065] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0066] The technical scheme that the present invention solves the problems of the technologies described above is:
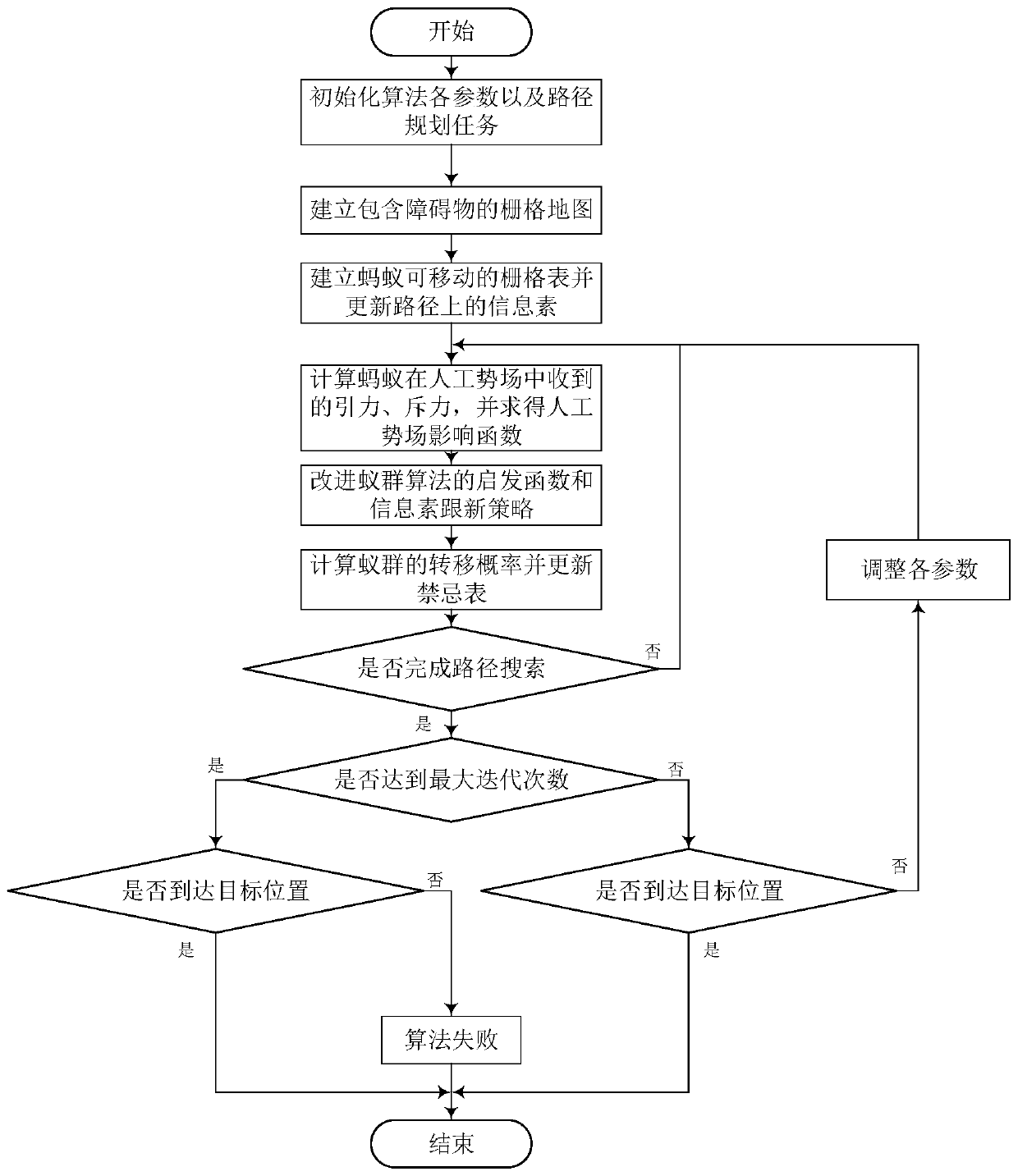
[0067] Such as figure 1 As shown, a mobile robot path planning method that combines artificial potential field algorithm and ant colony algorithm, which includes the following steps:
[0068] S1: Initialize the parameters in the ant colony algorithm and the artificial potential field algorithm, and initialize the path planning task.
[0069] S2: Establish a grid map containing obstacle information, including:
[0070]
[0071] c is the coverage rate of obstacles. When the coverage rate is greater than 0.5, it is assumed that the current grid is completely covered by obstacles; when the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com