Satellite/vision/laser combined urban canyon environment UAV positioning and navigation method
An urban canyon, positioning and navigation technology, applied in the field of measurement and testing, can solve the problems of insufficient positioning and navigation accuracy of drones, high computational complexity, occlusion and reflection, etc., to meet all-weather flight and operations, reduce calculations, reduce Effect of Small Errors and Computational Efforts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
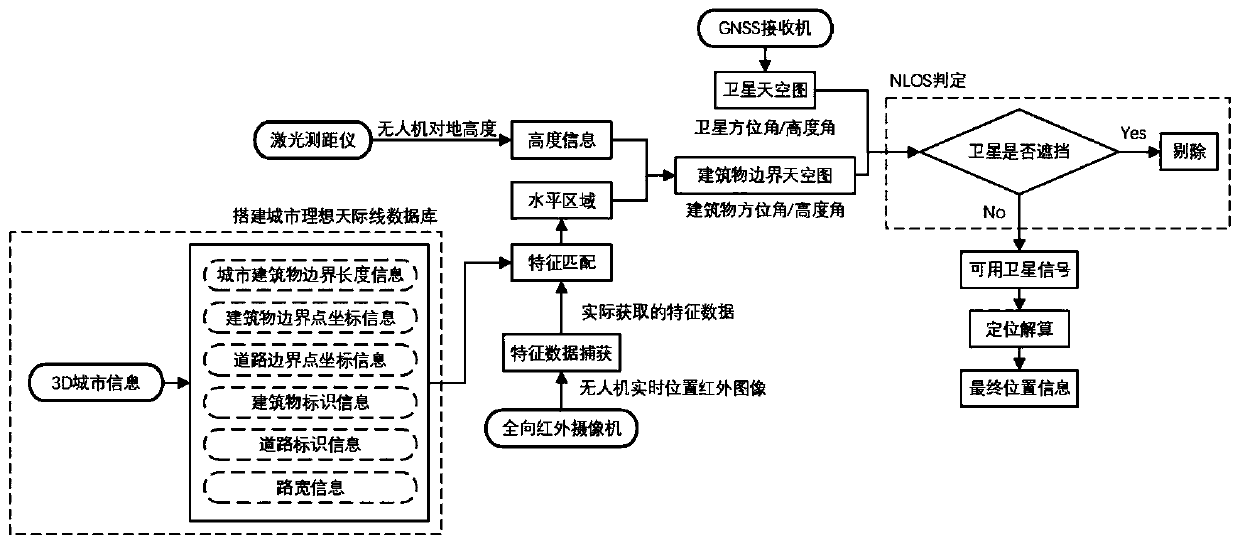
[0021] The technical solution of the invention will be described in detail below in conjunction with the accompanying drawings. The specific scheme of the UAV positioning and navigation method based on satellite / vision / laser combination in the urban canyon environment is as follows: figure 1 As shown, it includes the following five steps.
[0022] (1) Building a city skyline database
[0023] According to the 3D map information, extract the characteristic information of buildings and roads to construct a 2D ideal city skyline database in advance. The data information contained in the database mainly includes: urban building boundary length information, building boundary point coordinate information, building identification information, road width information, road boundary point coordinate information, road identification information, etc.
[0024] (2) Obtain the initial spatial position of the UAV
[0025]Use an omnidirectional infrared camera to capture the sky directly a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com