Control device and method for landing point area and speed of deep sea lander
A control device and lander technology, applied in height or depth control, vehicle position/route/height control, instruments, etc., can solve the problem of lack of speed control and the ability to resist ocean currents, the influence of underwater operation of the device, and unretrieved problems etc. to reduce the landing speed, consume less energy, and reduce the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to clearly illustrate the technical features of this solution, the present invention will be described in detail below through specific implementation modes and in conjunction with the accompanying drawings.
[0046] It should be noted that many specific details are set forth in the following description to facilitate a full understanding of the present invention, however, the present invention can also be implemented in other ways than those described here. Therefore, the protection scope of the present invention is not limited by the specific embodiments disclosed below.
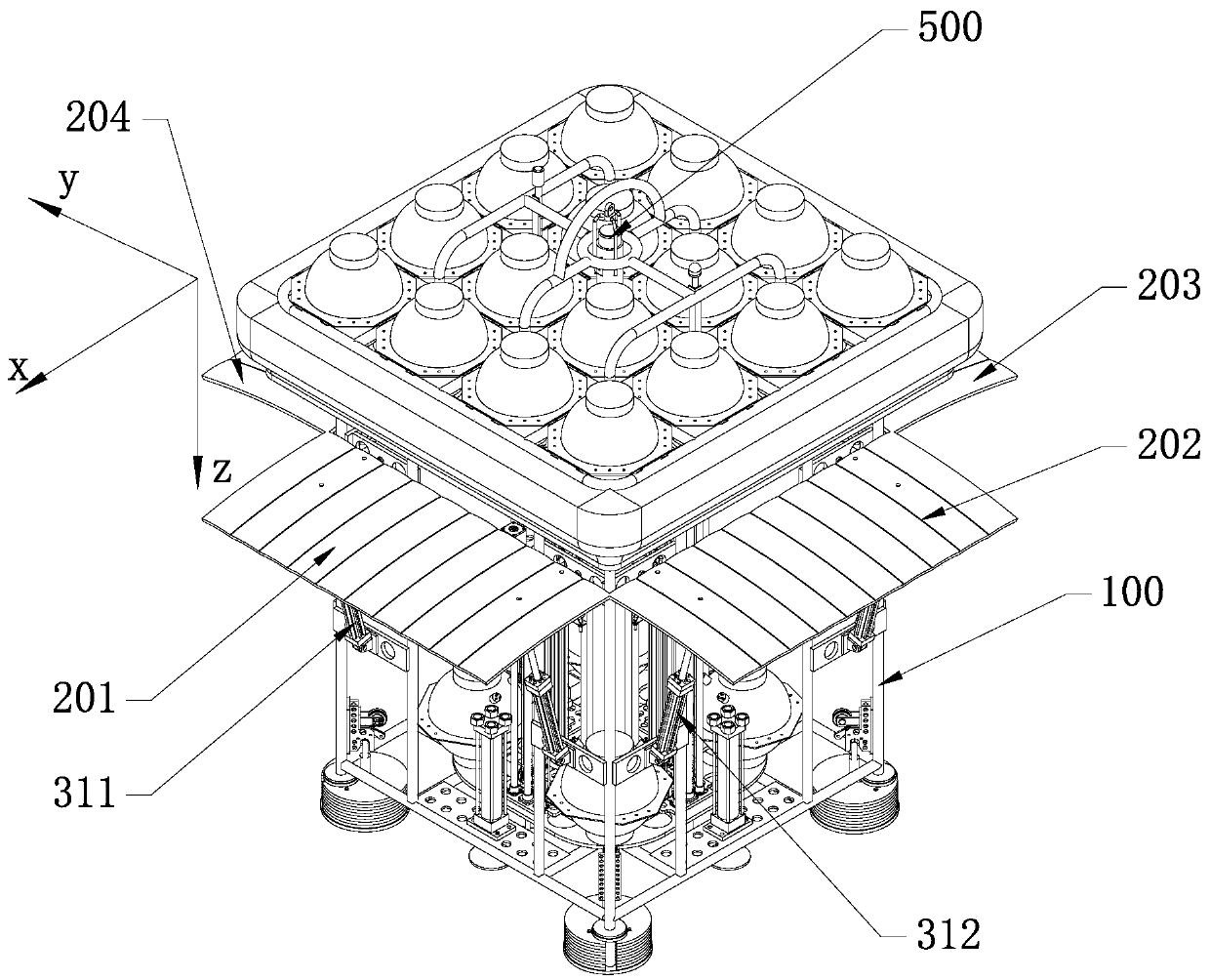
[0047] Such as figure 1As shown in , the control device for the landing area and speed of the deep-sea lander provided by the present invention includes a carrying platform 100. Specifically, in order to reduce the overall weight of the lander and facilitate the installation of required equipment, the carrying platform 100 is designed as The main body of the rectangular frame, and the floa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com