A Track Planning Method Based on Ant Colony Algorithm
An ant colony algorithm and track planning technology, applied in the field of unmanned aerial vehicles, can solve the problems of reducing fuel consumption, complex operation process, and starting point requirements, and achieve the effect of saving fuel
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with specific examples, but the embodiments of the present invention are not limited thereto.
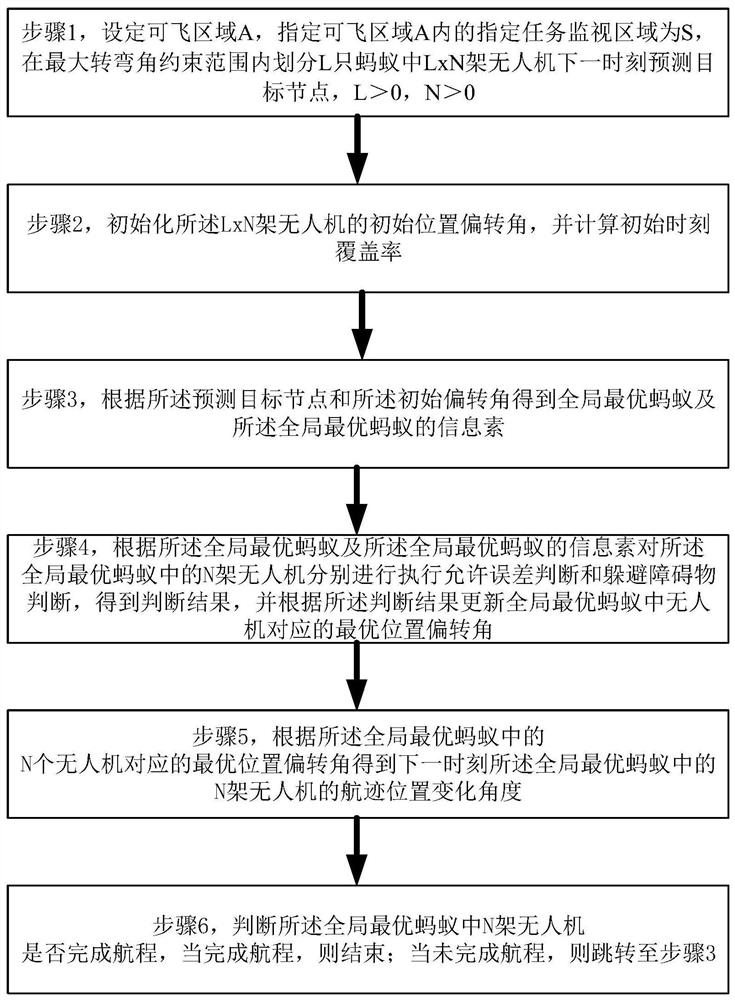
[0043] See figure 1 , figure 1 It is a flow chart of an ant colony algorithm-based track planning method provided by an embodiment of the present invention, including:
[0044] Step 1. Set the flyable area A, specify the designated task monitoring area in the flyable area A as S, and divide LxN drones among L ants within the maximum turning angle constraint range to predict the target node at the next moment, L> 0, N > 0;
[0045] Step 2, initialize the initial position and the initial deflection angle of the LxN unmanned aerial vehicle, and calculate the coverage rate at the initial moment according to the initial position and the initial deflection angle;
[0046] Step 3, obtaining the globally optimal ant and its pheromone according to the predicted target node and the initial deflection angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com