A smart car scheduling method for warehouse navigation based on global vision
A scheduling method and intelligent vehicle technology, applied in two-dimensional position/channel control, vehicle position/route/height control, control/adjustment system, etc., can solve the problem of increasing storage system configuration costs, high difficulty in storage system configuration, and unfavorable Overall planning and other issues to achieve the effect of reducing the amount of information interaction, reducing the amount of manual operations, and reducing waiting time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The following examples and drawings are combined to further describe the present invention in detail, but the embodiments of the present invention are not limited thereto.
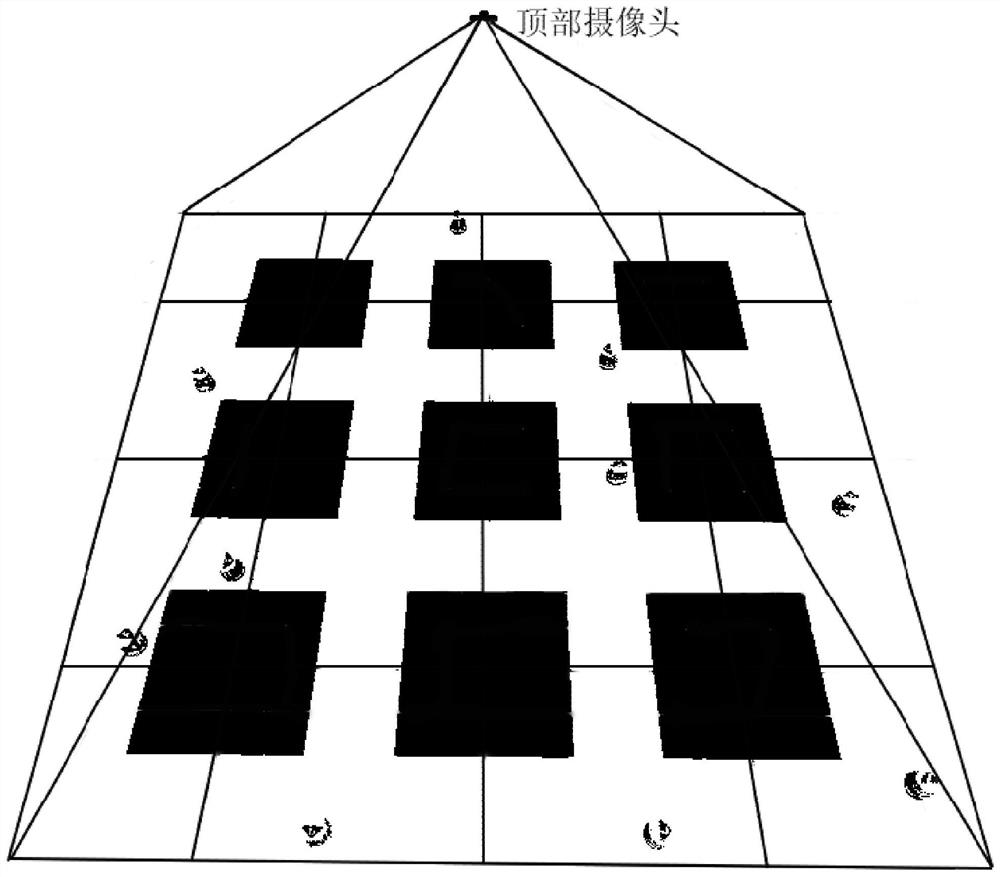
[0069] figure 1 As a storage system based on global vision, there are 10 storage navigation smart vehicles running in the warehouse on the Gazebo simulation platform. The top of the AGV is printed with a characteristic pattern containing numbers from 0 to 9. A camera is installed above the warehouse to obtain the global image of the warehouse. Then realize the identification and tracking of multiple AGVs.
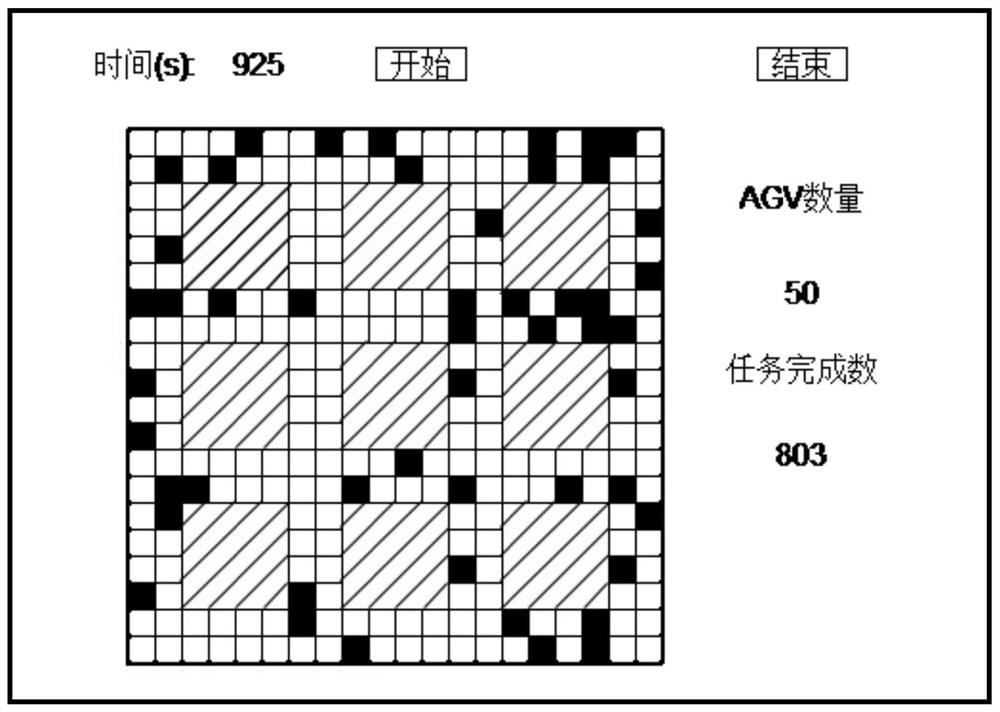
[0070] figure 2 For the multi-AGV scheduling part, use the MATLAB operation scheduling algorithm to control a total of 50 warehouse navigation smart vehicles including the above 10 AGVs. The black grid in the figure indicates the AGV, the white grid is the area where the AGV moves freely, and the shaded part is the obstacle. Areas that AGVs cannot pass through such as objects or shelves. In a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com