A brush detection method, device and medium for an unmanned sweeping vehicle
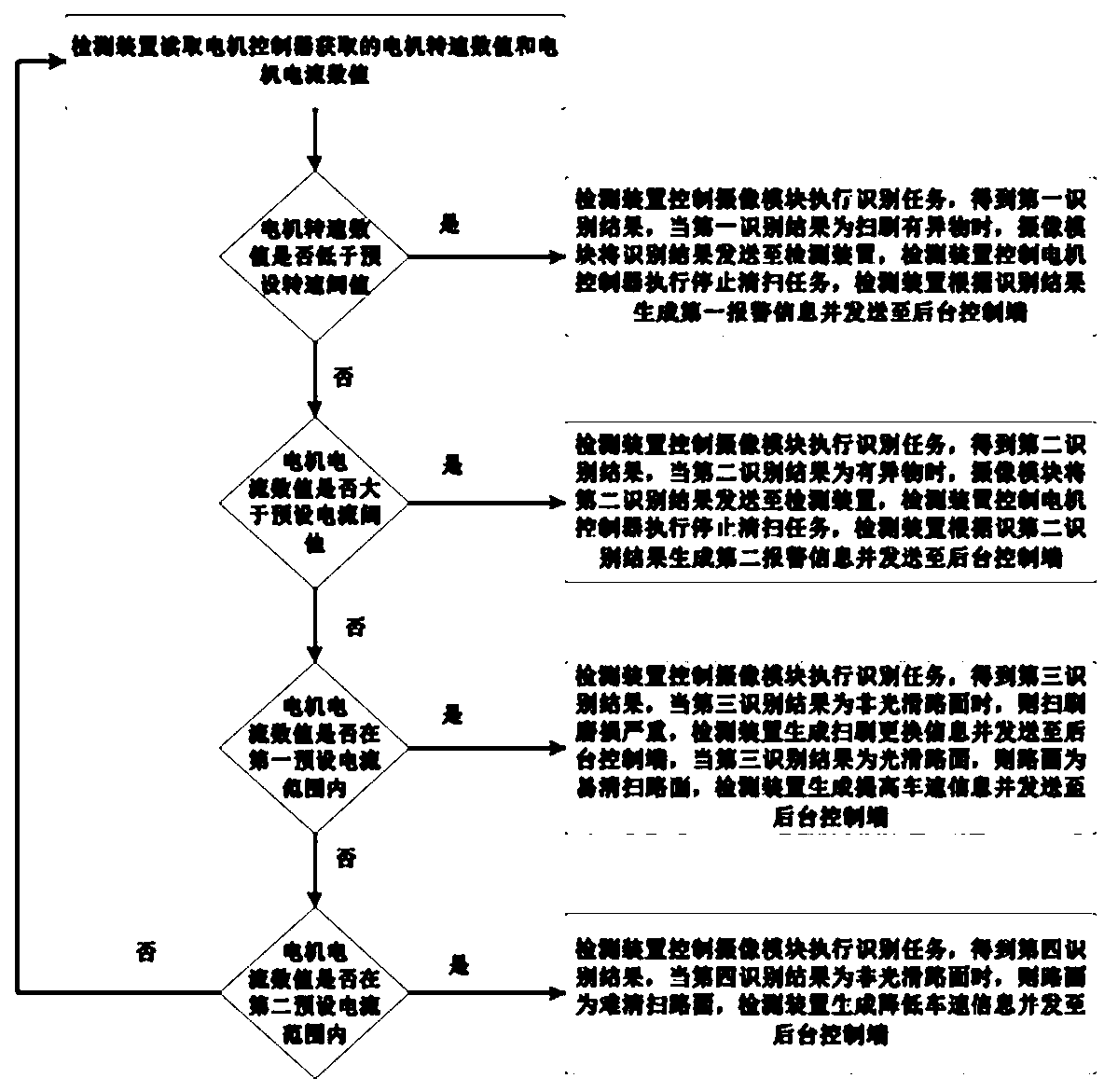
A technology of unmanned driving and detection methods, applied in cleaning methods, measuring devices, road surface cleaning, etc., can solve problems such as impossibility, slow manual observation efficiency, unattended, etc., and achieve the effect of avoiding detection deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
[0026] The invention provides a sweeping brush detection system of an unmanned sweeping vehicle. The unmanned sweeping vehicle includes a motor controller, a motor equipped with a Hall sensor, and a sweeping brush. The motor controller is connected to the motor, and the sweeping brush is connected to the motor. Connection, including a camera module, a detection device, and a Hall sensor, the detection device is installed on the unmanned sweeper, the camera module is installed on the detection device, and the camera module collects sweeping image information and road surface images Information, the camera module establishes communication with the detect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com