ROS based control system and method for unmanned aerial vehicles
A multi-UAV and control system technology, applied in the direction of control/adjustment system, attitude control, non-electric variable control, etc., can solve problems such as inability to continue rescue, affect rescue efficiency, and limited effect, so as to improve environmental adaptability, Improve the efficiency of task execution and the effect of various control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the drawings and embodiments. It should be noted that the specific embodiments of the present invention are only for describing the technical solution more clearly, and cannot be used as a limitation of the protection scope of the present invention.
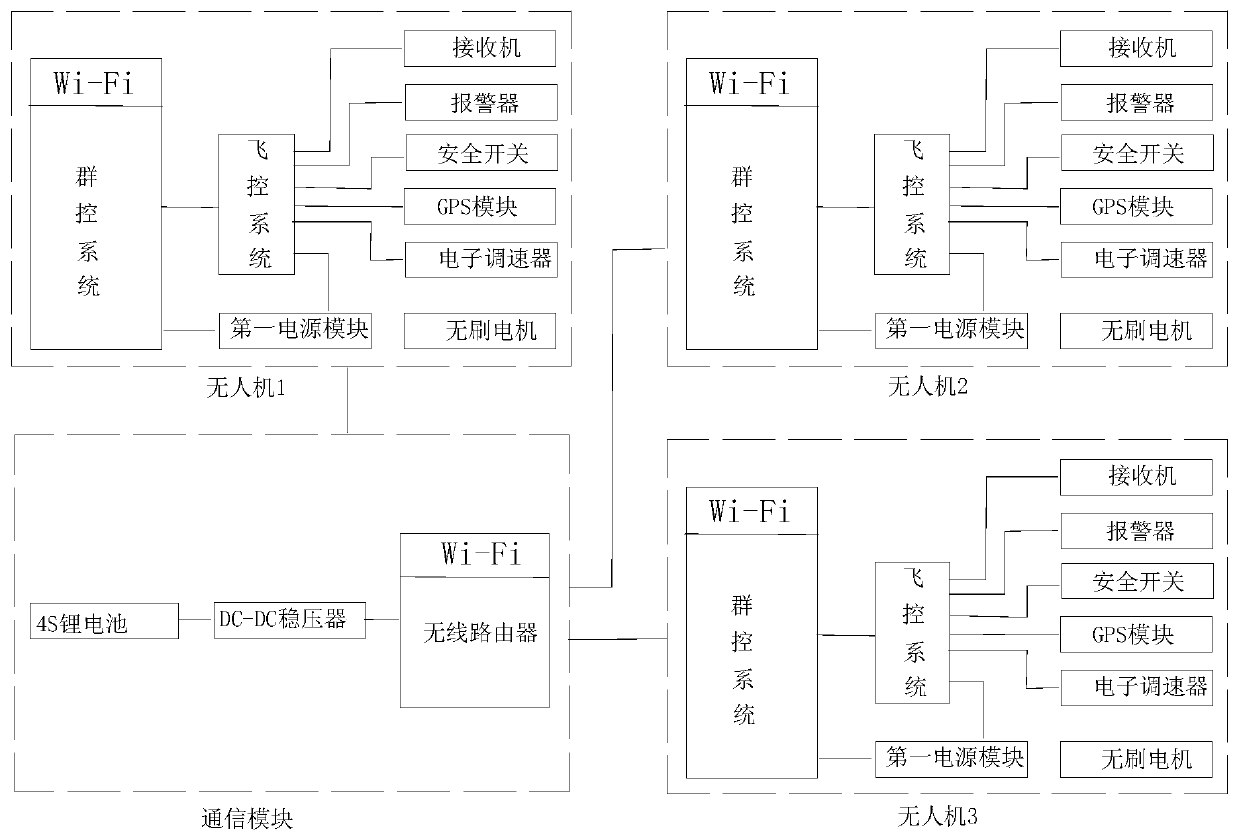
[0045] See Figure 1-Figure 8 , A multi-UAV control system based on ROS, including a communication module, a first power module and multiple drones, each drone includes a group control system set on a group control board and a flight control board The communication module is connected to a plurality of drones; the group control system is connected to the flight control system; the first power module is connected to the group control system and the flight control system, respectively ;
[0046] The group control system uses Raspberry 3Pi Mode B as the top-level controller, which is used to collect the position information of each drone in the system, obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com