Unmanned aerial vehicle long-distance tracking flight method and device, equipment and storage medium
A technology of unmanned aerial vehicle and flight position, applied in the field of unmanned aerial vehicle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
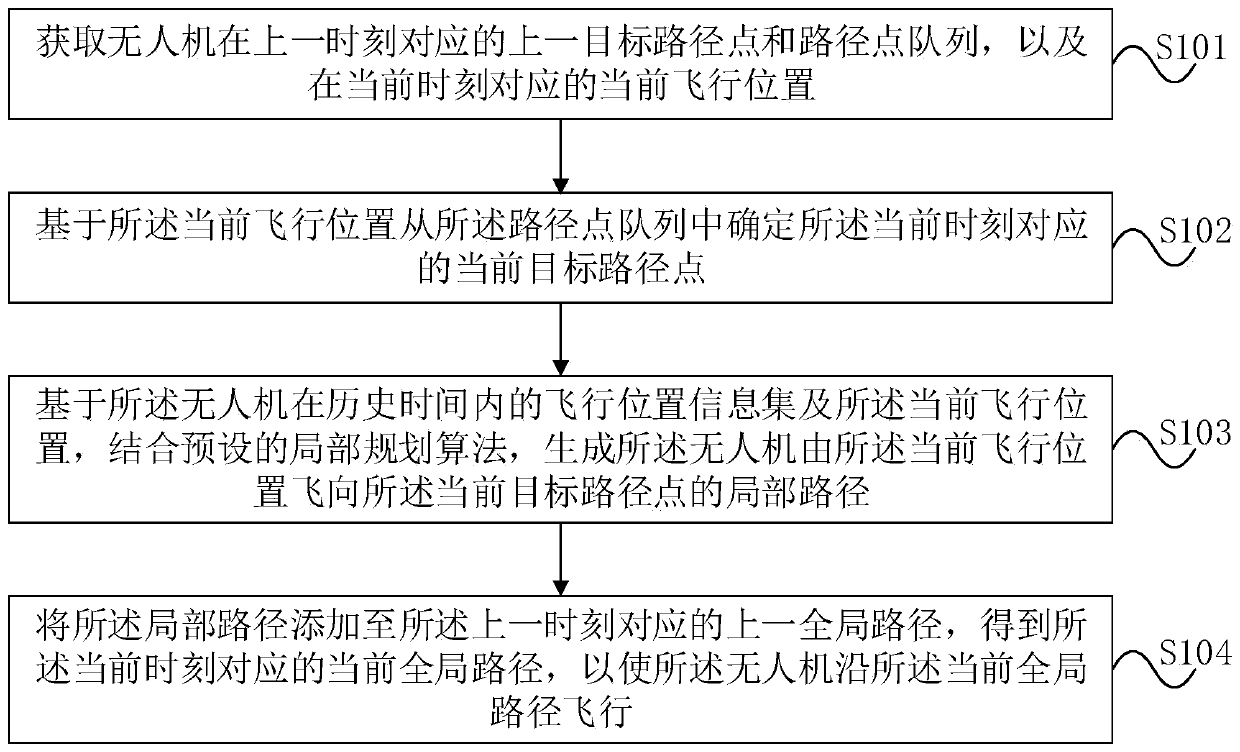
[0028] figure 1 It is a schematic flow chart of a long-distance tracking flight method for UAVs provided by Embodiment 1 of the present invention. This embodiment can be applied to combining local planning algorithms with global paths to make UAVs fly along preset trajectories as a whole In the case of reaching the end point, the method can be executed by a UAV long-distance tracking flight device, which can be realized by means of software and / or hardware, and can be integrated in the UAV.
[0029] It is understandable that for long-distance flight trajectory planning, when the preset waypoints reach a certain scale, the existing flight planning algorithm will not be able to generate a complete flight trajectory by using all the preset waypoints as constraints , to realize the long-distance tracking flight of UAV. The local planning algorithm can plan the flight trajectory or flight path of the UAV from the current flight position to the target position according to the set ...
Embodiment 2
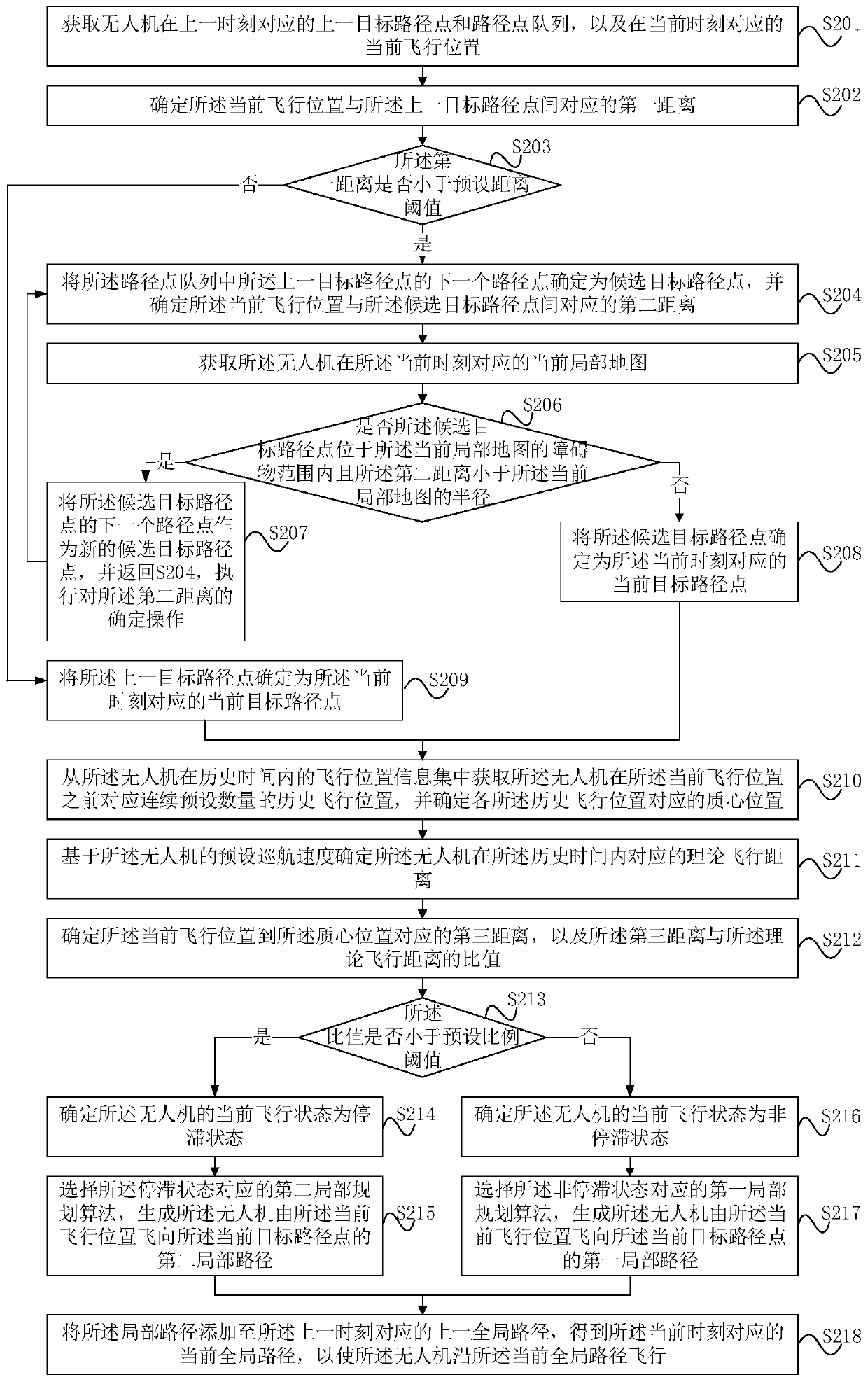
[0057] figure 2 It is a schematic flowchart of a method for long-distance tracking flight of a UAV provided in Embodiment 2 of the present invention. This embodiment is further optimized on the basis of Embodiment 1. In this embodiment, the determination of the current target waypoint corresponding to the current moment from the waypoint queue based on the current flight position is embodied as: determining the distance between the current flight position and the last target waypoint Corresponding first distance; when the first distance is less than the preset distance threshold, determine the next waypoint of the previous target waypoint in the waypoint queue as a candidate target waypoint, and determine the current The second distance corresponding to the flight position and the candidate target waypoint; obtain the current local map corresponding to the UAV at the current moment, and determine that the candidate target waypoint is located in the obstacle of the current loc...
Embodiment 3
[0096] Figure 4 It is a schematic flow chart of a UAV long-distance tracking flight device provided by Embodiment 3 of the present invention. This embodiment can be applied to combine the local planning algorithm with the global path to make the UAV fly along the preset trajectory as a whole In the case of the end point, the device can be realized by software and / or hardware, and the device specifically includes: an information acquisition module 401 , a target determination module 402 , a path generation module 403 and a path addition module 404 .
[0097] The information acquisition module 401 is used to obtain the last target waypoint and waypoint queue corresponding to the drone at the last moment, and the current flight position corresponding to the current moment;
[0098] A target determination module 402, configured to determine the current target waypoint corresponding to the current moment from the waypoint queue based on the current flight position;
[0099] The p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com