Robot remote operating system and method based on VR
An operating system and robot technology, which is applied in the field of robot teleoperation, can solve the problems of time delay, poor interactive experience, and insufficient sensitivity of the robot teleoperation system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing, technical scheme of the present invention will be further described:
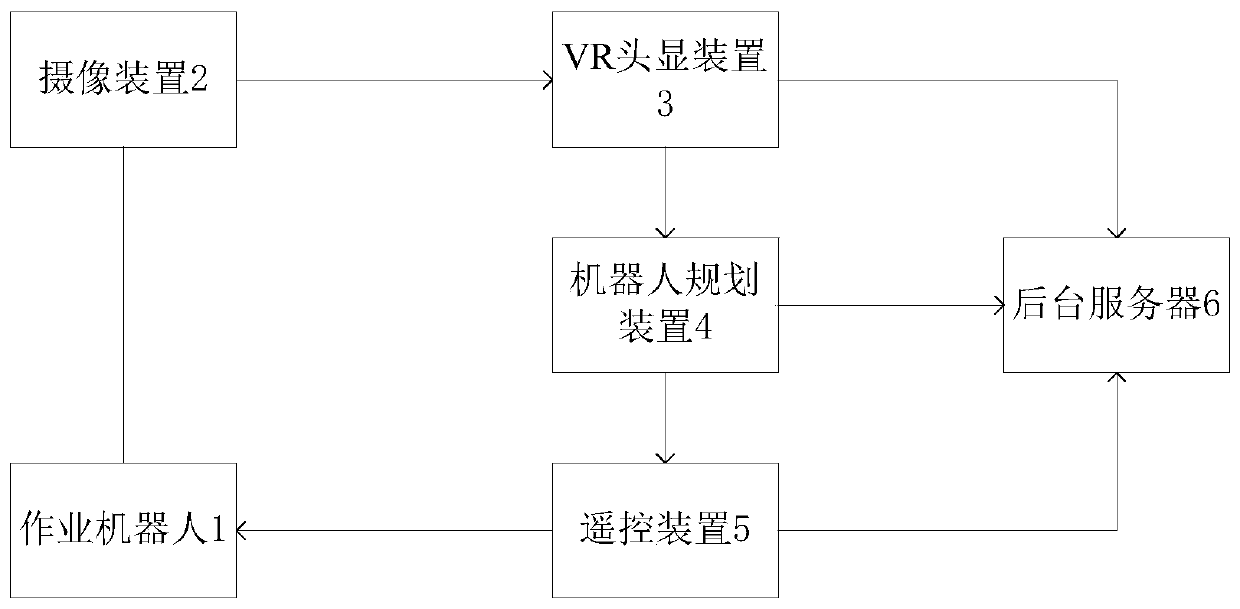
[0042] A VR-based robot teleoperation system, such as figure 1 As shown, it mainly includes a working robot 1, a camera device 2, a VR head display device 3, a robot planning device 4, a remote control device 5 and a background server 6;
[0043]The operating robot is the controlled object in the system, which is mainly used to execute action instructions in the operating environment and transmit the execution results of the action instructions to the VR head-mounted display device and the robot planning device. The working robot includes a live working vehicle and at least two mechanical arms. The mechanical arm is installed on the side or top of the live working vehicle according to the operation requirements. Instructions call robotic arms at different locations to perform actions. There are also multiple sensors installed on the robotic arm, inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com