Industrial robot platform with dual-core motion controller
A technology of motion controller and industrial robot, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of inaccurate and stable control, and achieve the effects of increasing system stability, good safety, and increasing structural rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
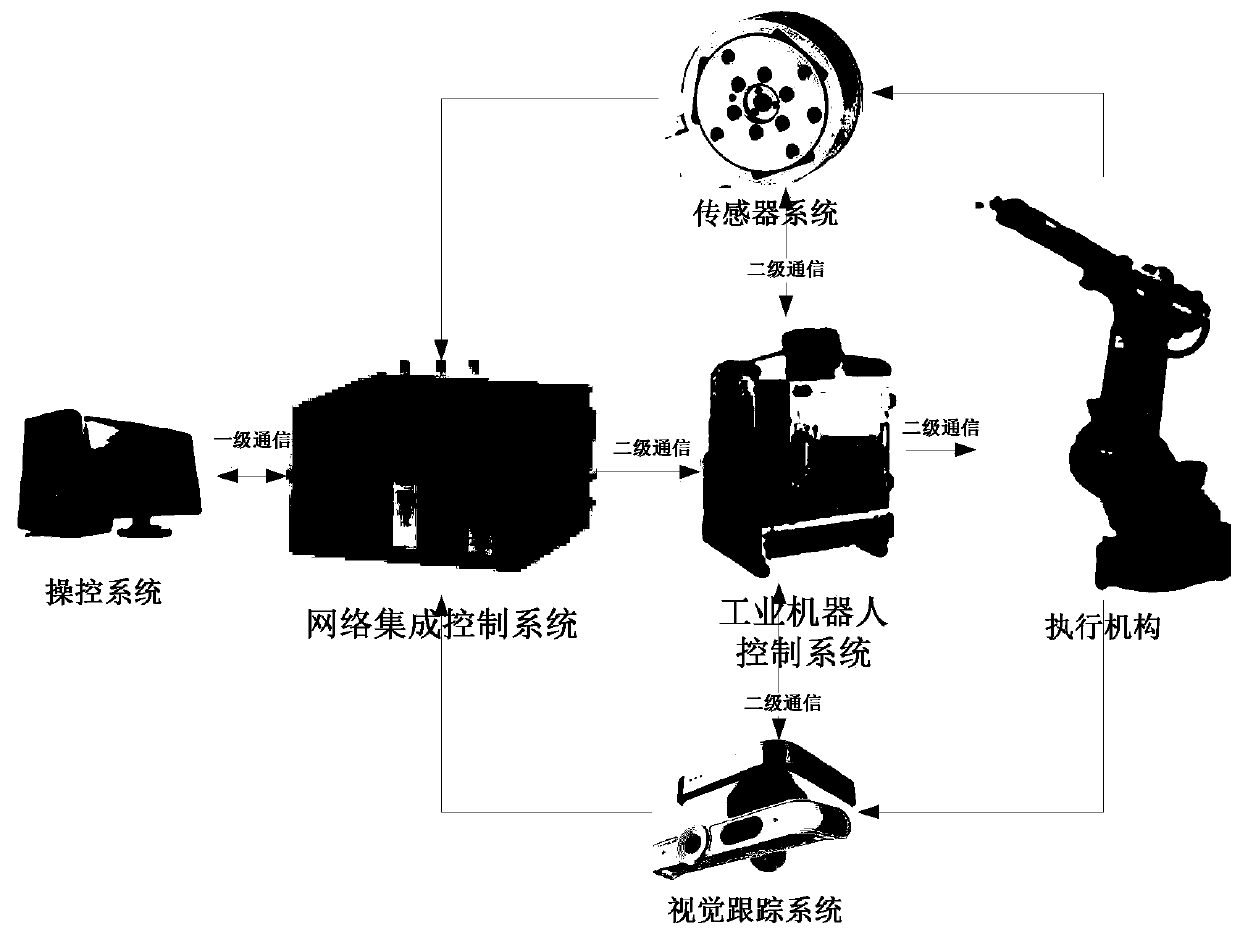
[0030] An industrial robot platform with a dual-core motion controller, including an industrial robot control system, a sensor system, a control system, a network integrated control system, a visual tracking system and an actuator, the sensor system is connected to the industrial robot control system,
[0031] The control system receives data from the sensor system and the visual tracking system through the network integrated control system and sends control instructions to the industrial robot control system. The industrial robot control system controls the actuator, and the sensor system is installed on the actuator to monitor the position and posture of the actuator in real time. , the sensor system and visual tracking system are also connected with the industrial robot control system for real-time feedback of the working status of the actuator and monitoring of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com