Minimally invasive surgery system and control method using self-expandable flexible micro-operating arm
A minimally invasive surgery and manipulating arm technology, applied in the directions of surgery, surgical forceps, surgical manipulators, etc., can solve the problems such as the large size of the instrument cannot work in the urethra, the nasal cavity, the flexibility of the rigid structure and the small movement space, and the inability to meet the requirements. Avoid blind spots, precise operation and precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
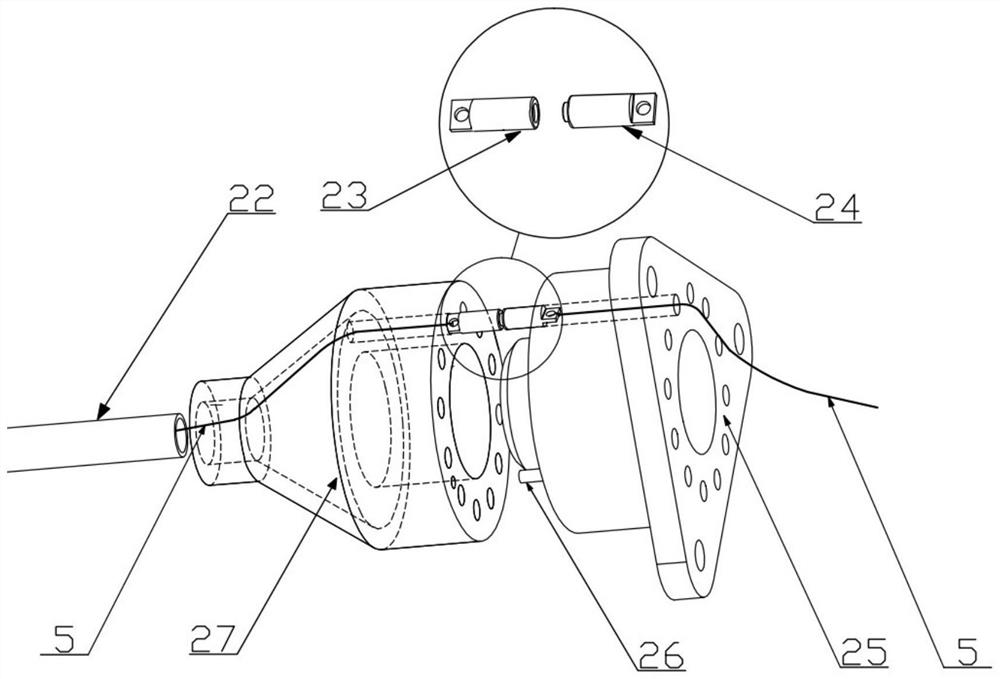
[0044] see figure 1 As shown, a robot minimally invasive surgery system is provided, taking bladder surgery as an example, a flexible micro-manipulator arm mechanism 1; a drive rope quick connection mechanism 2; a rope connector and a rope drive control mechanism connecting stud 3; a rope drive control mechanism 4 ; Driving rope 5; Rope driver and rope drive control mechanism connecting nut 6; Bladder 7.
[0045] refer to figure 2 Shown is a schematic diagram of the rope-driven control mechanism. The mechanism includes two motor support frames; the first support frame 19 of the drive motor group and the second support frame 20 of the drive motor group are connected with the second support frame connecting stud 12 by the first support frame, and the motor 14 passes through Motor bracing frame and motor connecting screw 15 are connected on the bracing frame, and three groups of motors are conically distributed on the bracing frame, and the traction rope is concentrated at the...
Embodiment 2
[0052] refer to Figure 8 Shown is the principle block diagram of minimally invasive surgical robot system. The operator controls the rope-driven controller through the visual feedback of the camera, the force feedback of the surgical forceps and the stress feedback on the operating arm, adjusts the posture and stiffness of the operating arm, and completes the operation.
[0053] Specifically, the control method of the above-mentioned minimally invasive surgery system includes a control method of a micro-manipulator, and the method includes the following steps:
[0054] Step 1: Install a miniature camera at the end of the micro-manipulator arm to find lesions, adjust the posture of the camera and other actuators according to the visual feedback signal of the micro-camera, and provide a better viewing angle to ensure that the clamp and the laser probe are close to the lesion;
[0055] Step 2. If the visual feedback has a blind spot in the field of vision and cannot fully feedbac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com