Wheel-leg hybrid hexapod robot
A hexapod robot and hybrid technology, applied in the field of robotics, can solve the problems of weak carrying capacity of wheel-leg mechanism, complex wheel-leg switching, small swing range of single leg, etc., and achieve the effect of strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific embodiment, the present invention is described in further detail:
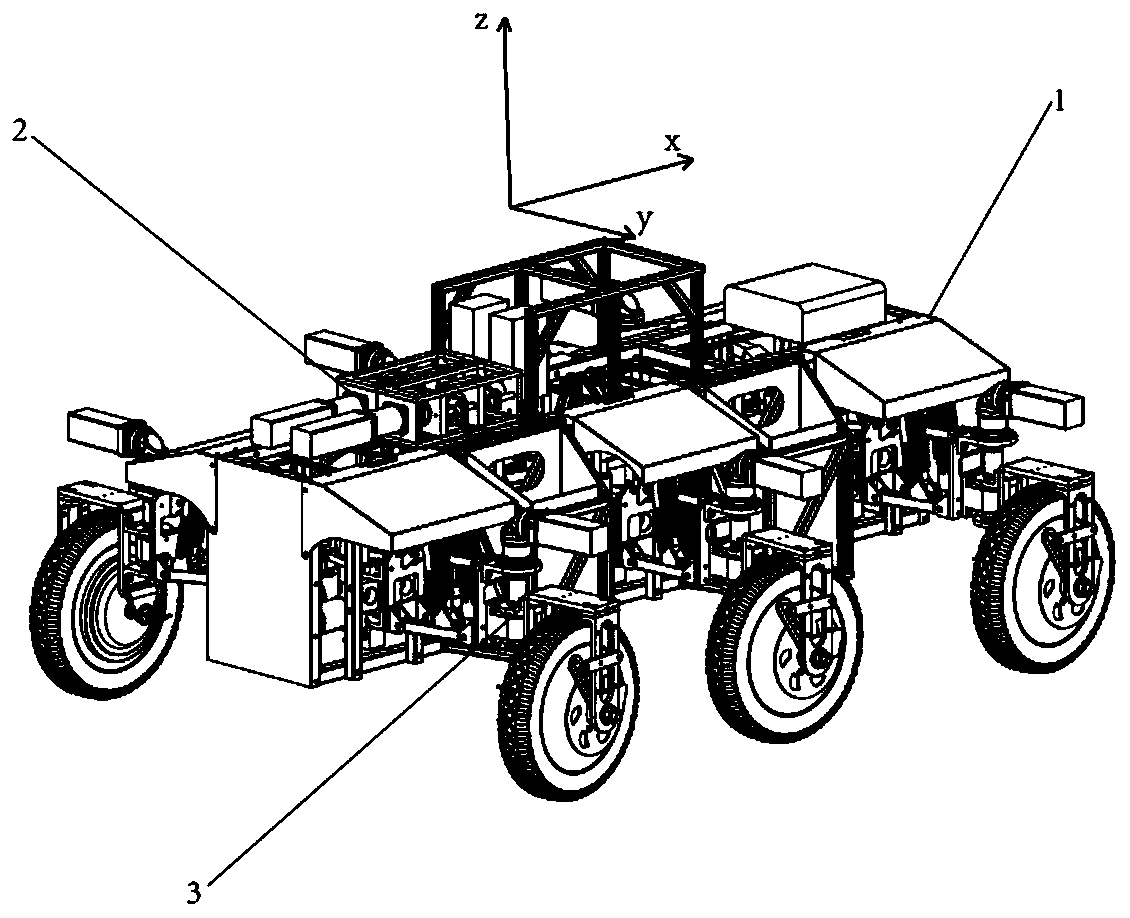
[0036] refer to figure 1 , a wheel-leg hybrid hexapod robot, including a frame 1, a brake system 2 and six wheel sets 3, wherein:
[0037] The frame 1 includes a frame body 11 and a frame cover 12;
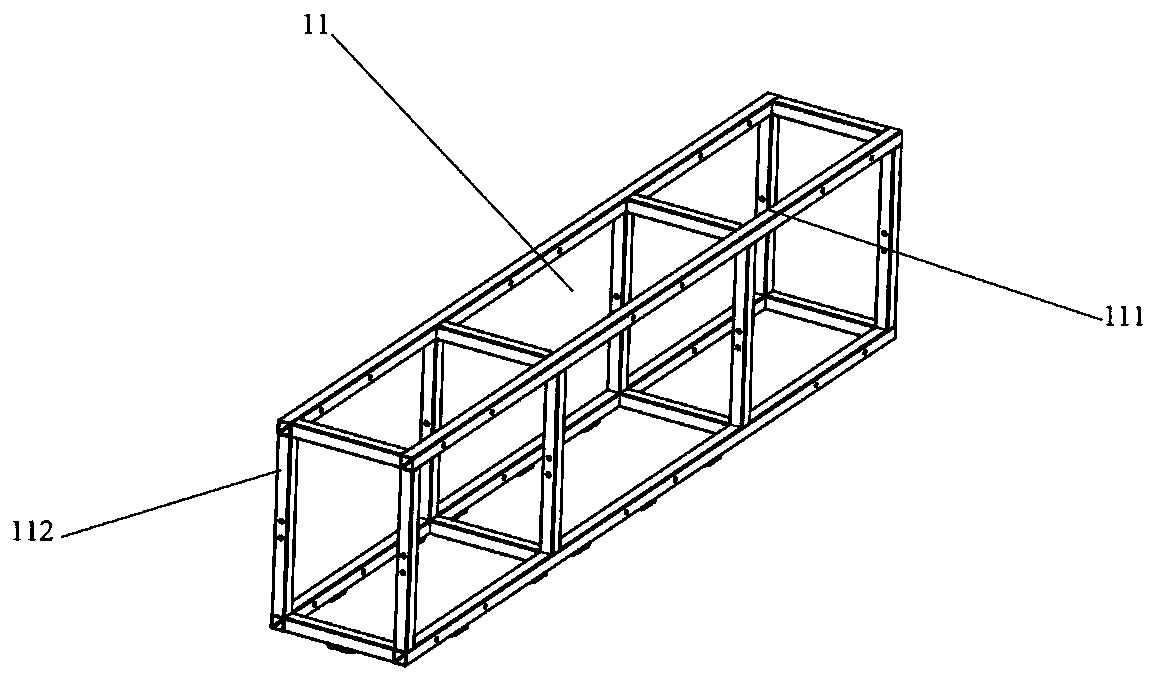
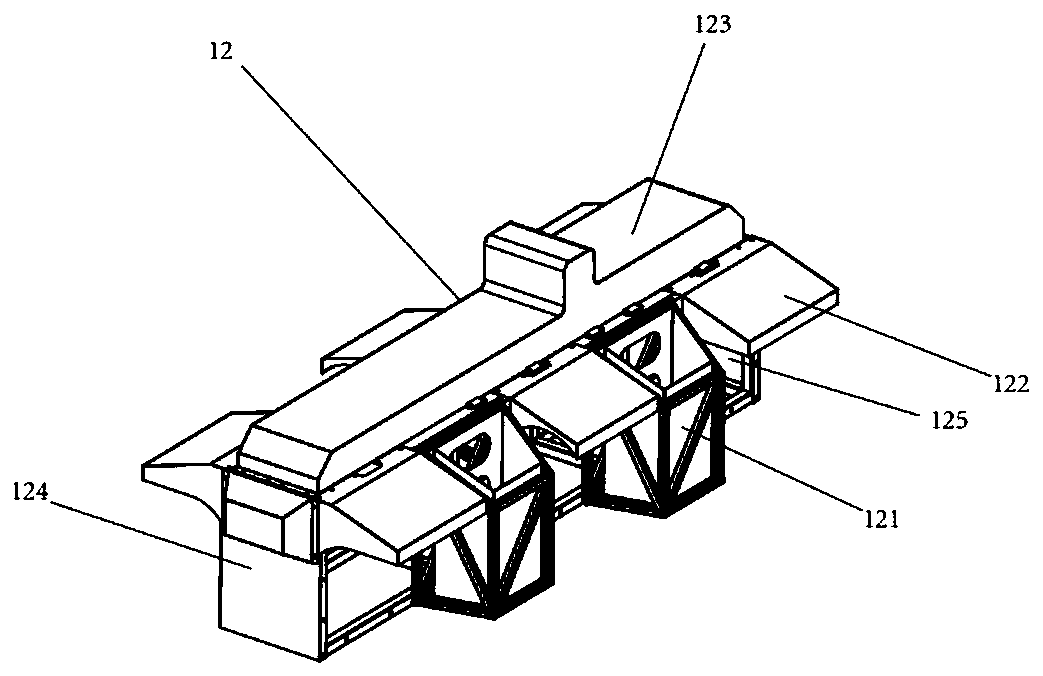
[0038] refer to figure 2 , 3 , the vehicle frame 11 includes a rectangular frame 111 and a longitudinal beam 112; the rectangular frame 111 is composed of a long beam 111 and a cross beam 112, and the long beam 111 and the cross beam 112 are respectively located on the top surface and the bottom surface of the vehicle frame frame 11; The vehicle frame cover 12 includes four battery protection boxes 121, six side guards 122, a roof protection cover 123, a first protection plate 124 and a second protection plate 125; the battery protection box 121 is located on the vehicle frame 11 side; the side guard plate 122 is located above the six wheel se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com