Obstacle detection and autonomous obstacle avoidance method for intelligent wheelchair
An obstacle detection and obstacle technology, which is applied in the field of obstacle avoidance technology, can solve the problems of accumulation of sensor measurement errors, systematic errors, unsuitability for large-scale environments, and difficulty in obtaining a globally consistent map, etc. Reduce the accumulation of mileage errors and observation errors, and achieve the effect of accurate environmental mapping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
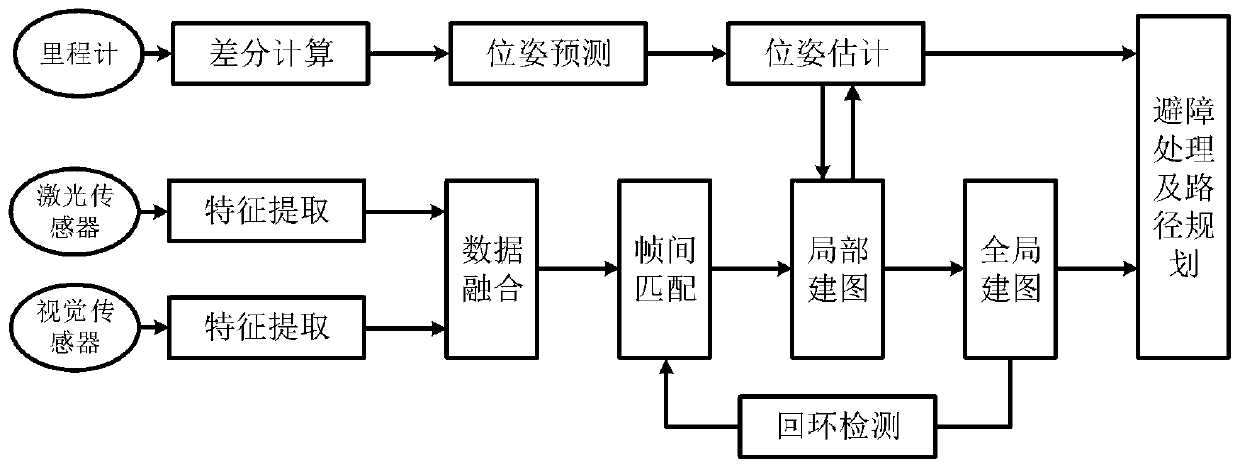
[0032] combine figure 1 , an obstacle detection and autonomous obstacle avoidance method for an intelligent wheelchair, comprising the following steps:
[0033] Step 1, coordinate system model, motion model, laser sensor observation model, and estimate the traveling pose of the wheelchair through the mileage;
[0034] Step 2, detecting the moving environmental obstacles through the visual sensor and determining the edge contour of the obstacles;
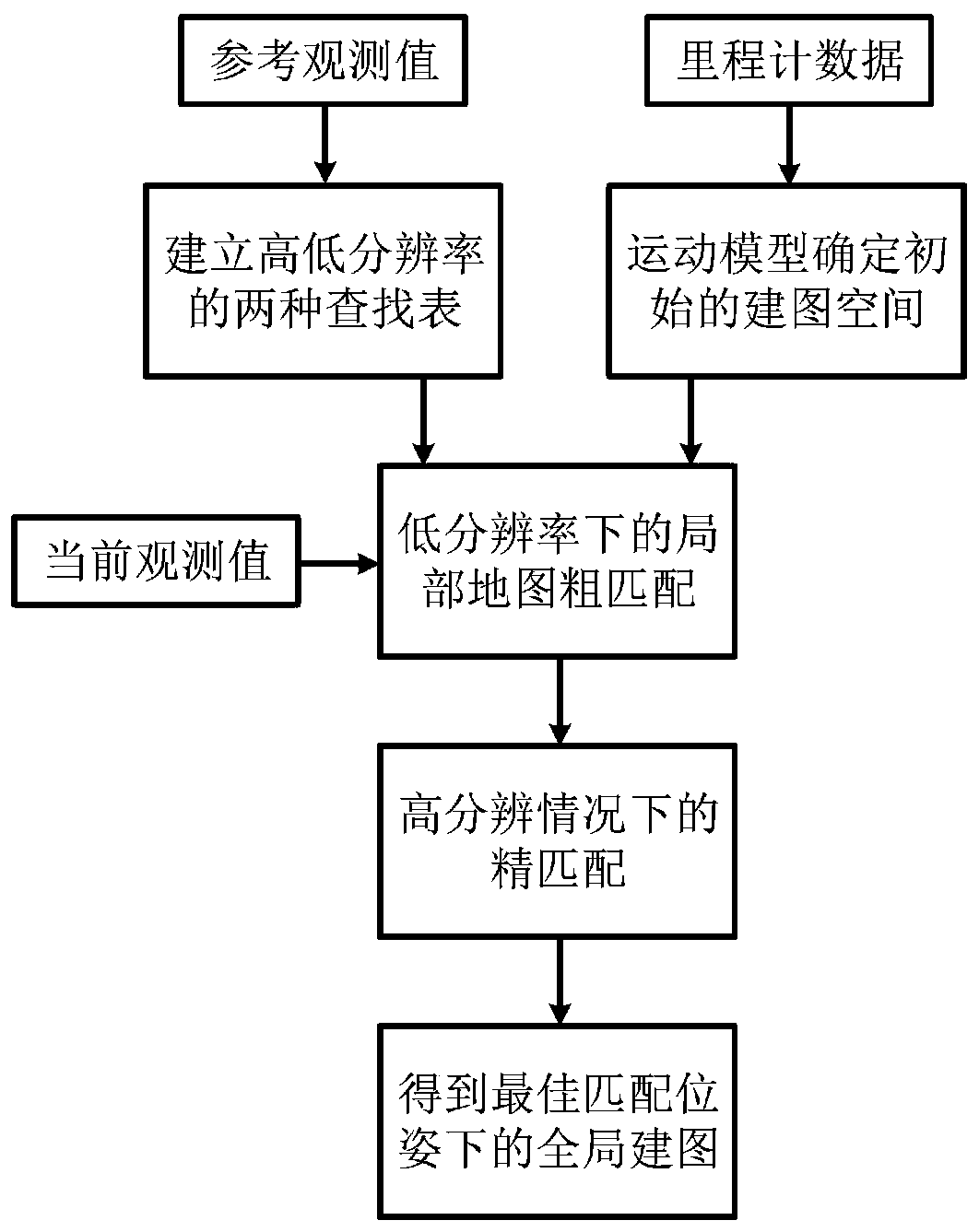
[0035] Step 3, create a local map through a graph-optimized mapping algorithm;
[0036] Step 4, according to the local mapping results, a globally consistent map is generated by the grid method;
[0037] Step 5: According to the obstacle and the posture state of the wheelchair, the direction and speed of the wheelchair obstacle avoidance are planned through the repulsion potential field method.
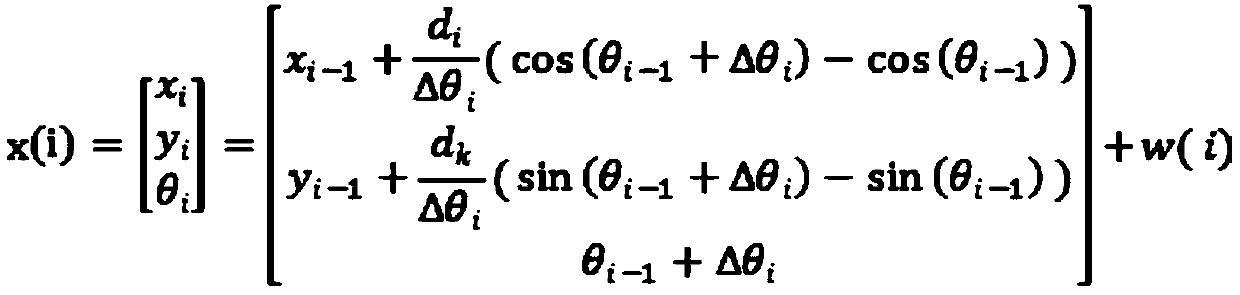
[0038] Step 1, the smart wheelchair is a two-wheel differential, and the motion model of the wheelchair can be established through the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com