


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
RTK Kalman filtering optimization method for unmanned aerial vehicles
A technology of Kalman filter and optimization method, which is applied in the direction of radio wave measurement system, satellite radio beacon positioning system, measurement device, etc., and can solve inaccurate positioning, large deviation of elevation information, low processing efficiency of manual inspection status discovery, etc. Problems, to achieve accurate position and elevation positioning, improve sensitivity and accuracy, and improve positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0054] In order to better understand the technical content of the present invention, specific embodiments are provided below, and the present invention is further described in conjunction with the accompanying drawings.
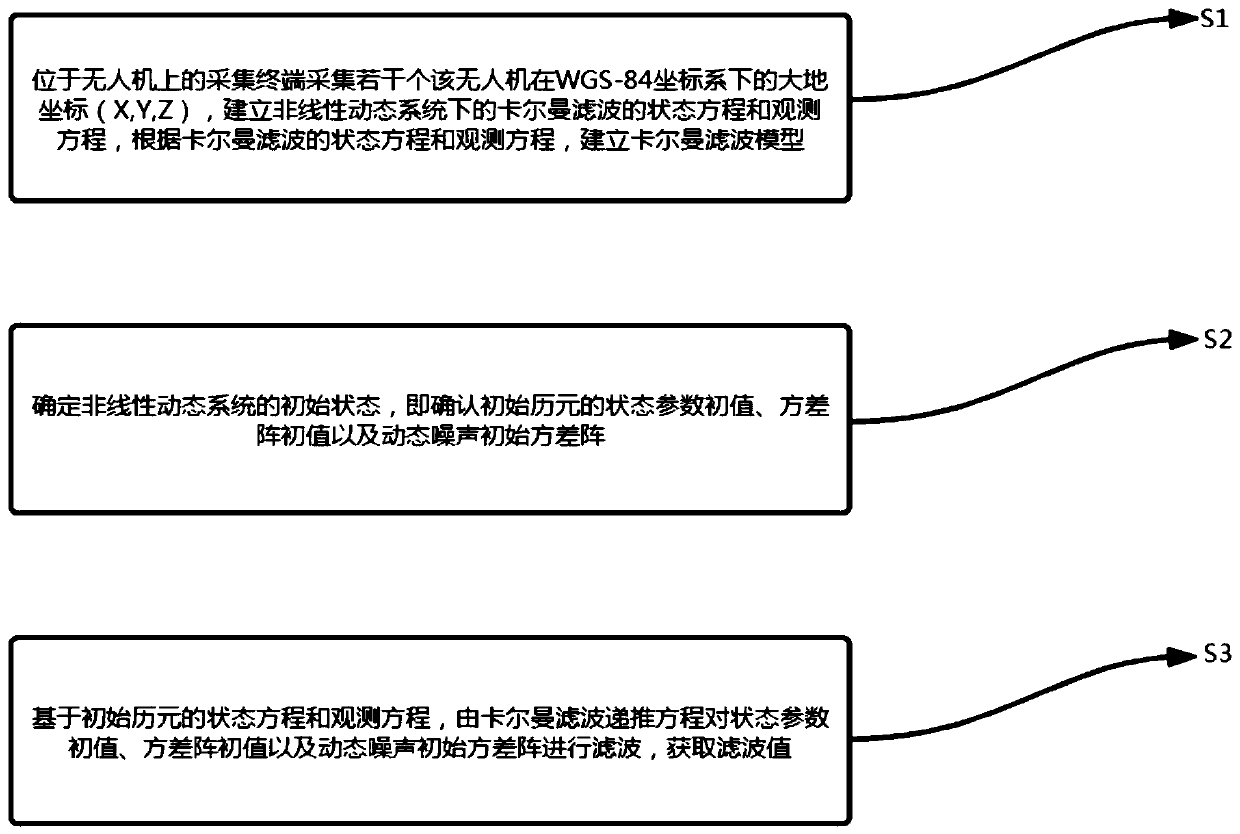
[0055] see figure 1, the invention discloses a RTK Kalman filter optimization method for unmanned aerial vehicle, it is characterized in that, comprises:
[0056] S1. The acquisition terminal located on the UAV collects several geodetic coordinates (X, Y, Z) of the UAV in the WGS-84 coordinate system, and establishes the state equation and observation equation of the Kalman filter under the nonlinear dynamic system , according to the state equation and observation equation of the Kalman filter, the Kalman filter model is established;
[0057] S2. Determine the initial state of the nonlinear dynamic system, that is, confirm the initial value of the state parameter, the initial value of the variance matrix and the initial variance matrix of the dynamic noise i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com