Radar micro-Doppler signal extraction method of rotor unmanned aerial vehicle
A micro-Doppler signal, unmanned rotor technology, applied in radio wave measurement systems, instruments and other directions, can solve problems such as difficult parameter estimation and large computational load, and achieve the effect of improving frequency estimation accuracy and detection probability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
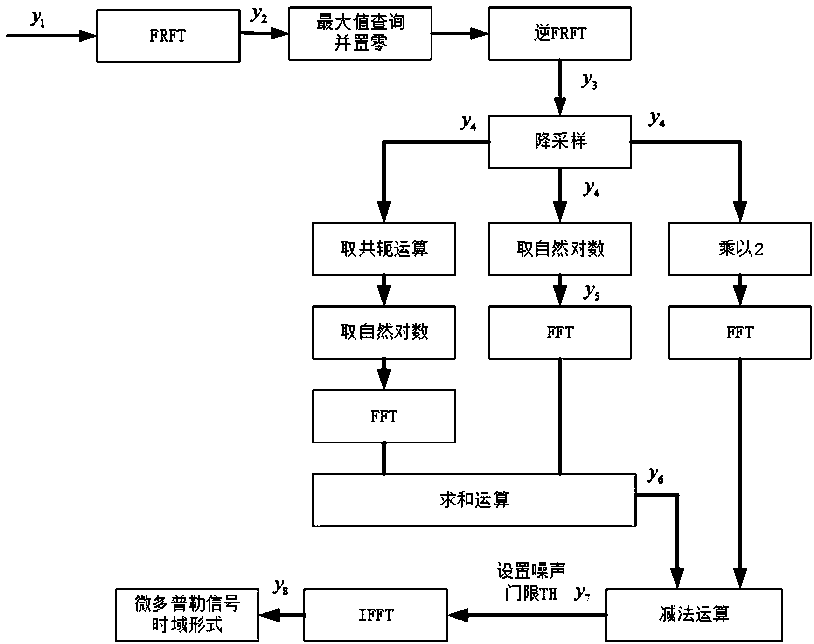
[0055] Such as Figure 1 to Figure 4 The radar micro-Doppler signal extraction method of a kind of rotor drone shown, comprises the following steps:
[0056] S1: The discrete form of the detected UAV radar echo signal is:
[0057]
[0058] In formula (1), A 0 ,A p ,δ p Represents the amplitude of different components of the signal, in volts, where p∈[1,P], P is the total number of targets; f 0 is the frequency of the body echo signal, in Hz; f p is the micro-Doppler frequency of different rotor echo signals, the unit is Hz; k is the modulation frequency of the airframe echo signal, the unit is Hz / s; n is the number of signal sampling points, n∈[1,N], N is the total number of points, The unit is one; T s is the signal sampling interval in seconds; s noise is Gaussian white noise; j represents the sign of the imaginary part.
[0059] In the present embodiment one, P=1; A 0 =5,A 1 =1,δ 1 =3, the unit is volts; f 0 = 10Hz, f 1 = 2Hz; k = 0.5 Hz / s; N = 2000; T s is...
Embodiment 2
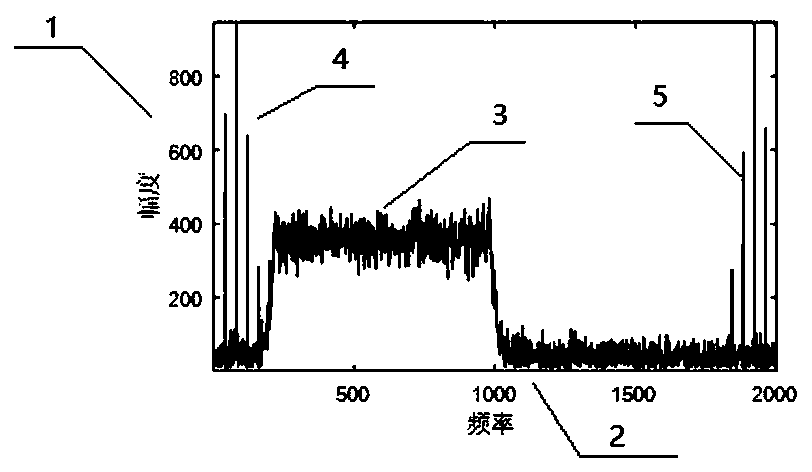
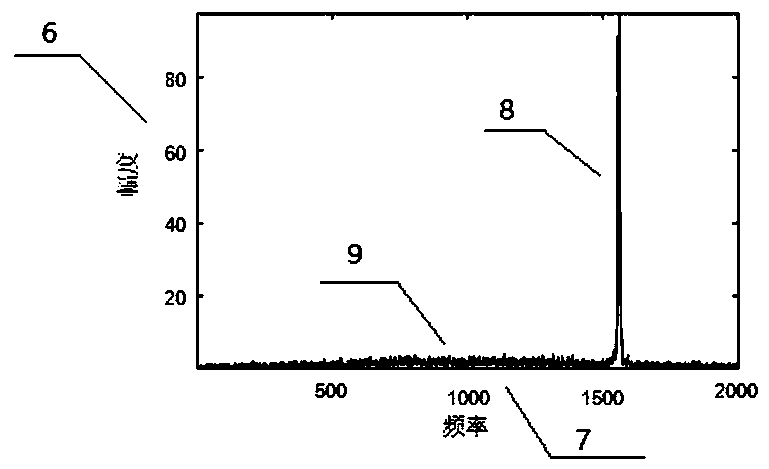
[0090] The radar micro-Doppler signal extraction method of a kind of rotor unmanned aerial vehicle that present embodiment two provides, specific situation is by figure 1 , Figure 5 , Figure 6 Jointly shown.
[0091] The specific implementation steps of the radar micro-Doppler signal extraction method of a rotor UAV in the second embodiment are as described in the first embodiment, including eight steps of S1 to S8, and the detection process is also as follows figure 1 A total of 8 processes described in the present embodiment will not be repeated in this embodiment two.
[0092] On the basis of Embodiment 1, this Embodiment 2 further verifies the effect of Δn on the micro-Doppler signal frequency estimation effect in the method of the present invention. The differences between the signal extraction method of Embodiment 2 and Embodiment 1 are as follows:
[0093] 1. The step S1 in A 0 =5,A 1 =2,δ 1 = 4;
[0094] 2. In step 4, Δn is 5 and 10 respectively;
[0095] 3. ...
Embodiment 3
[0099] The radar micro-Doppler signal extraction method of a kind of rotor UAV that present embodiment three provides, specific situation is by figure 1 , Figure 7 Jointly shown.
[0100] The specific implementation steps of the radar micro-Doppler signal extraction method of a rotor UAV in the third embodiment are as described in the first embodiment. The eight steps of S1 to S8 are in total, and the detection process is also as follows figure 1 A total of 8 processes described in the present embodiment will not be repeated in the third embodiment.
[0101] On the basis of Embodiment 1 and Embodiment 2, this Embodiment 3 further verifies the detection situation of the multi-component signal by the method of the present invention. The differences between this Embodiment 3 and the signal extraction method of Example 1 and Embodiment 2 are as follows:
[0102] 1. The number of target signals in the step S1 is p=2, the micro-Doppler frequency of signal 1 is 2 Hz, and the micro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com