An Algorithm for Improving the Point Cloud Density Calculation of Sheet Surface by 3D Profile Sensor
A sensor and cloud density technology, applied in computing, computing models, instruments, etc., can solve the problems of increasing manufacturing cost, price increase, unacceptable manufacturing cost, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
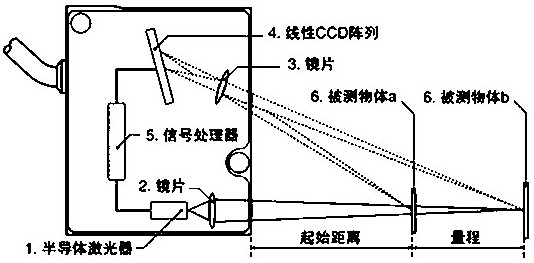
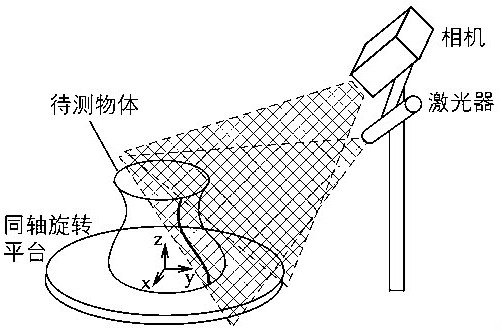
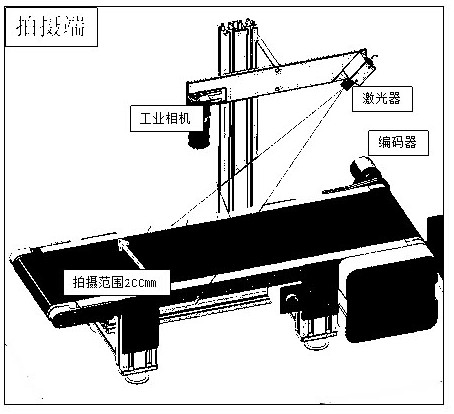
[0057] Such as figure 1 As shown in Fig. 1, the algorithm for improving the 3D profile sensor to calculate the point cloud density of the plate surface is shown. First, build a set of ultra-high standard equipment for obtaining real data with high-grade lasers and industrial cameras. Use this set of equipment to scan a large number of specific types of panels (such as wood panels) to be inspected to obtain ultra-high-density point cloud data for training and testing of this type of panels.
[0058] For any specific type of plate, the depth value (z value) of a certain coordinate (x, y) in the point cloud density map has a certain cross-correlation with the depth values of a series of coordinates around the point. Convert the point cloud data into a 2D depth map; then normalize the depth map and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com