Algorithm for improving plate surface point cloud density calculated by 3D contour sensor
A sensor and surface point technology, applied in the field of improving the point cloud density calculation of the surface of the 3D profile sensor, can solve the problems of unacceptable manufacturing cost, increase of mechanism design cycle, price increase, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
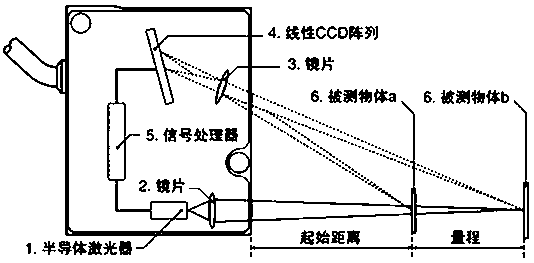
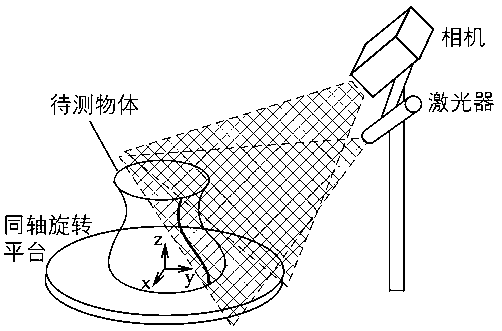
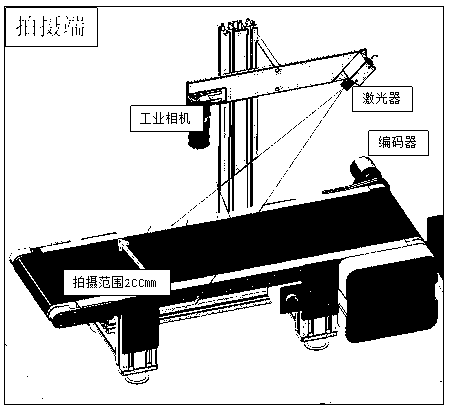
[0057] Such as figure 1 As shown in Fig. 1, the algorithm for improving the 3D profile sensor to calculate the point cloud density of the plate surface is shown. First, build a set of ultra-high standard equipment for obtaining real data with high-grade lasers and industrial cameras. Use this set of equipment to scan a large number of specific types of panels (such as wood panels) to be inspected to obtain ultra-high-density point cloud data for training and testing of this type of panels.
[0058] For any specific type of plate, the depth value (z value) of a certain coordinate (x, y) in the point cloud density map has a certain cross-correlation with the depth values of a series of coordinates around the point. Convert the point cloud data into a 2D depth map; then normalize the depth map and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com