Intelligent real-time prediction method for high-speed large-range maneuvering target track
A technology for maneuvering targets and real-time prediction, applied in neural learning methods, neural architectures, biological neural network models, etc., can solve problems such as large errors, lack of fast and accurate prediction methods, and large limitations, so as to improve prediction speed and improve The effect of training speed and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
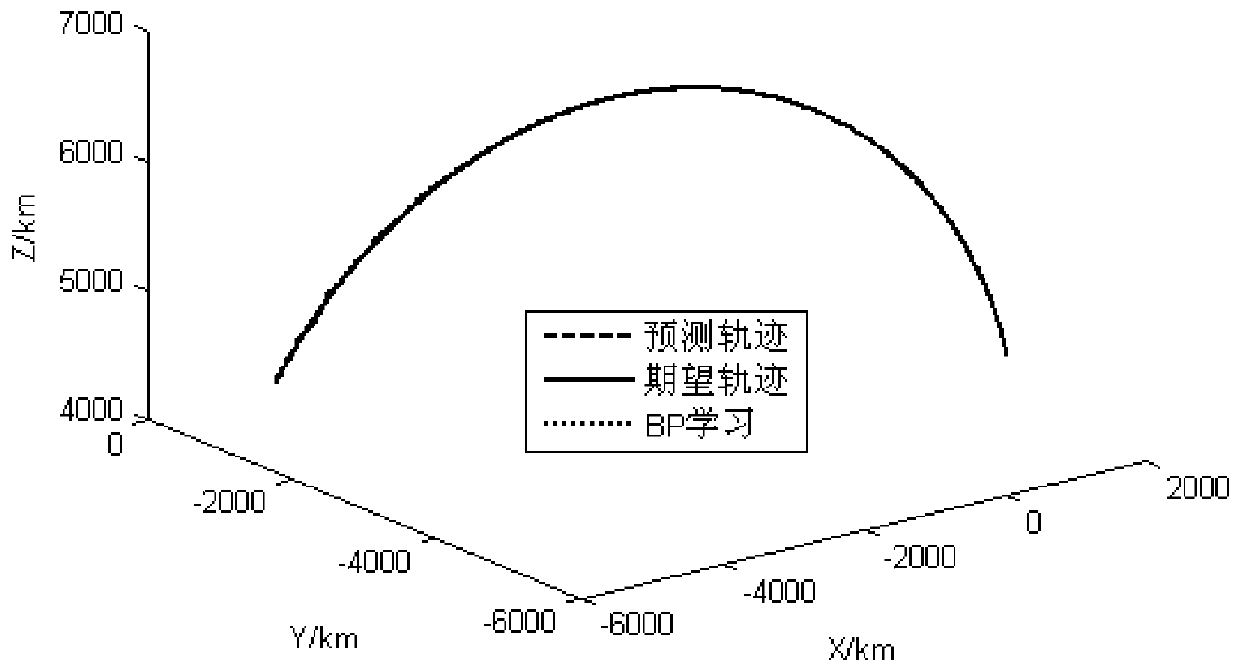
[0064] figure 1 It is a three-dimensional ballistic missile (high-speed and large-range maneuvering target) flight trajectory generated by STK software; among them, the sampling time in the simulation is 1s, and the historical data of the first 100s is used for curve fitting without prediction.
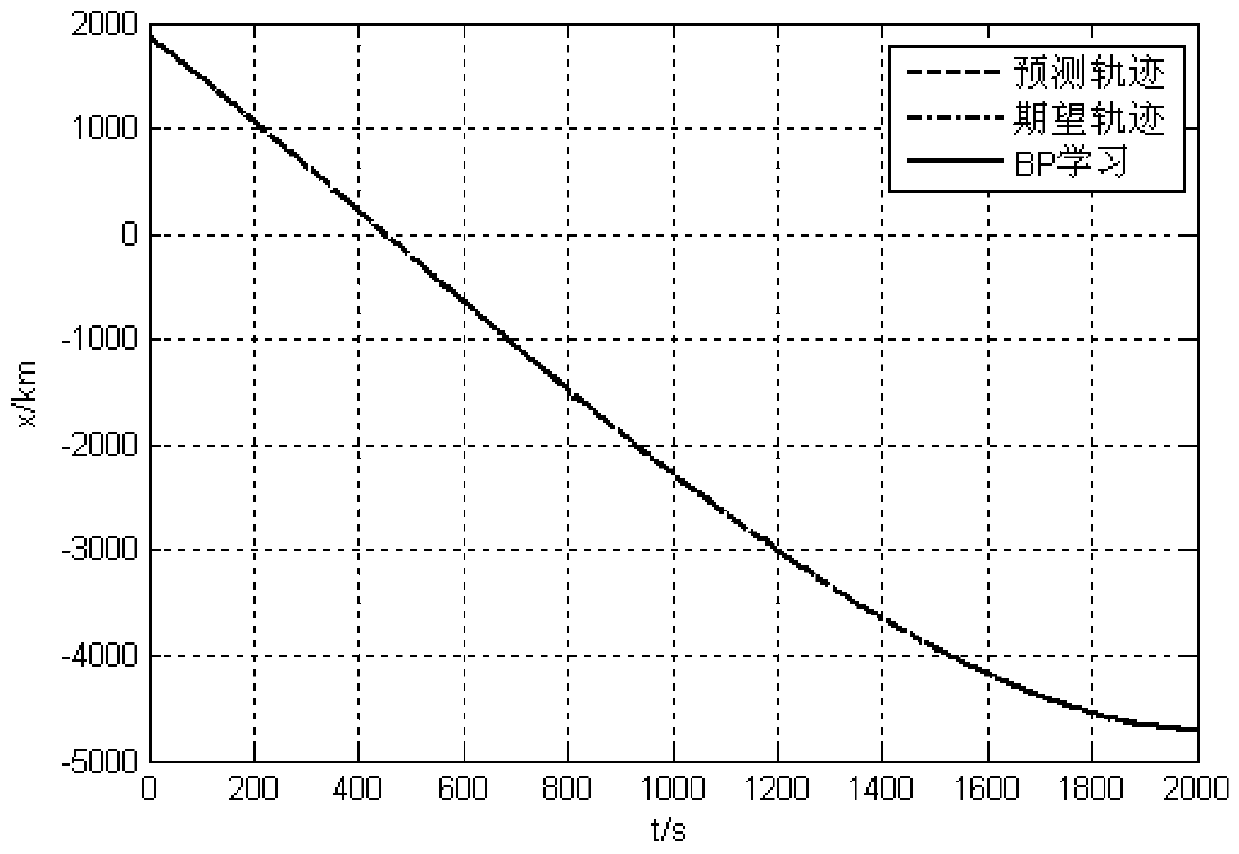
[0065] Utilize the intelligent real-time prediction method of moving target track based on improved BP neural network that the present invention proposes, obtain Figure 2 to Figure 5 The X-axis actual position and the predicted position, the Y-axis actual position and the predicted position, the Z-axis actual position and the predicted position, and the track prediction deviation of the sky moving target shown. From Figure 2 to Figure 5 It can be seen from the figure that the predicted trajectory obtained by the method of the present invention is basically consistent with the real trajectory of the high-speed and large-scale maneuvering target, the maximum predicted deviation on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com