


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Cleaning method, cleaning robot and computer storage medium
A cleaning robot, computer storage technology, applied in the field of robots, can solve the problems of poor user experience, omission of cleaning, poor cleaning effect, etc., to improve cleaning effect and work efficiency, avoid missed cleaning, and improve experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
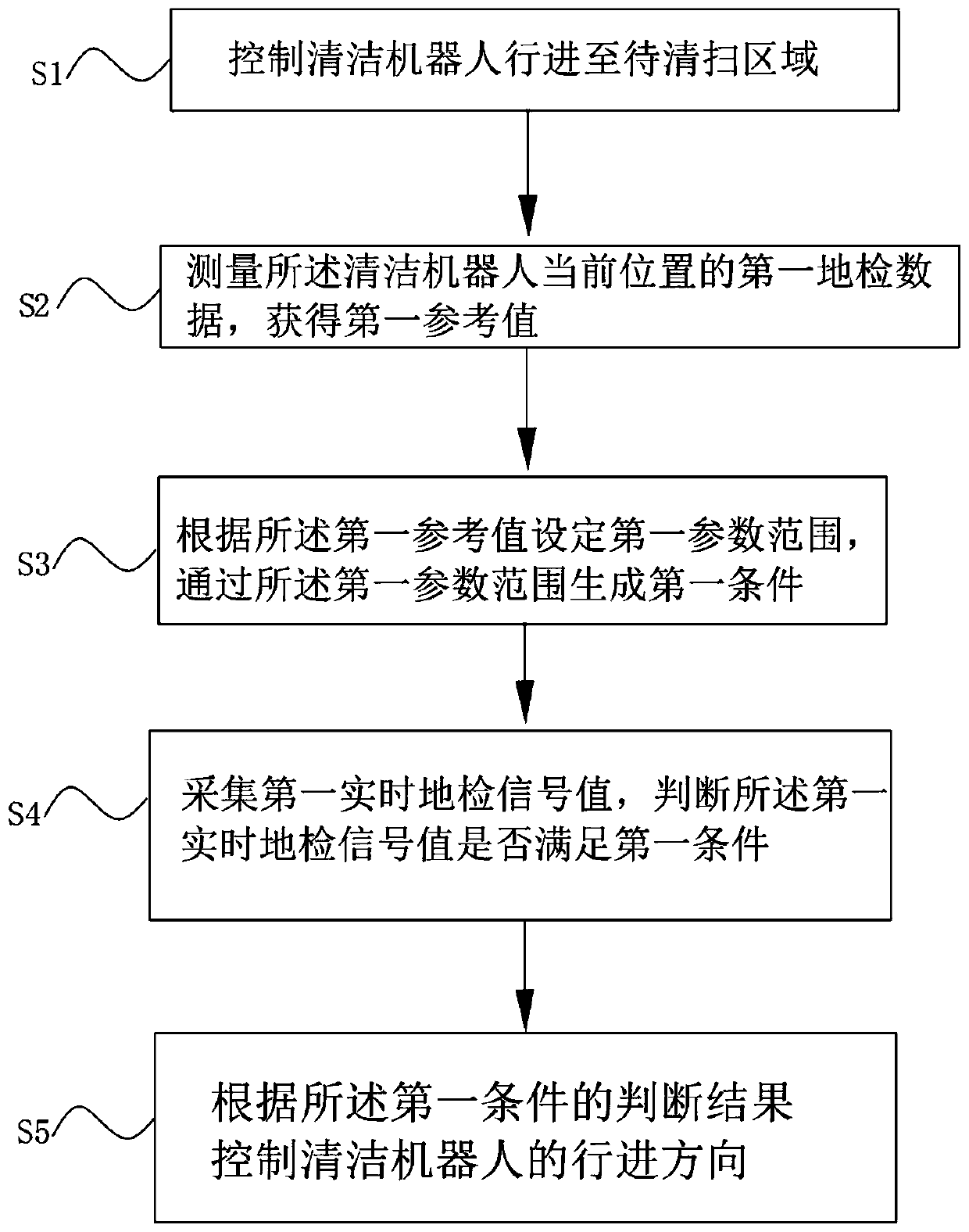
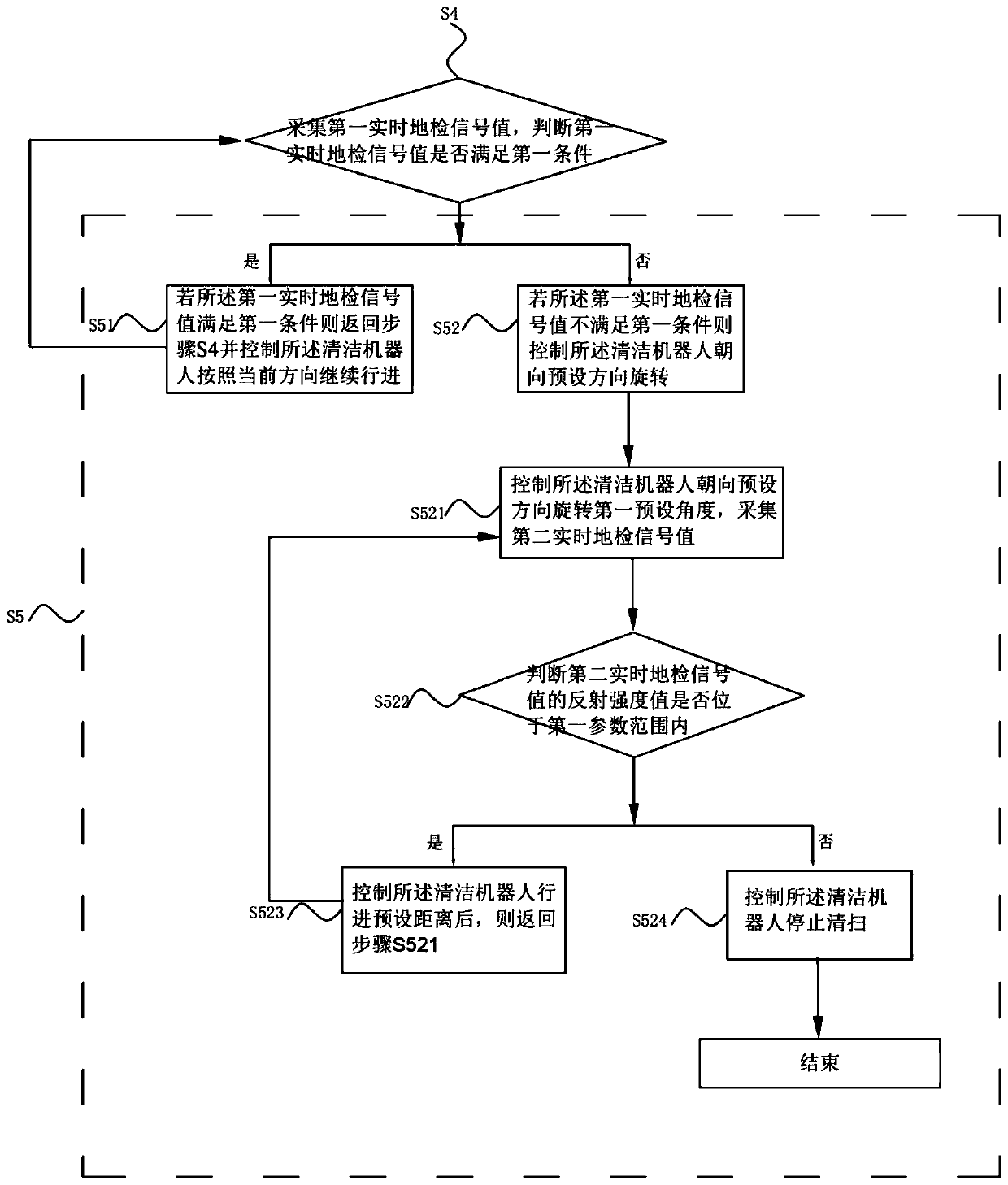
[0061] Example 1, please refer to the attached figure 2 And attached Figure 5 , when the cleaning robot 10 is cleaning along the "bow"-shaped route in the fourth area 400, step S52 includes:
[0062] Step S521, controlling the cleaning robot 10 to rotate toward a preset direction at a first preset angle, when the cleaning robot 10 moves to the Figure 5 In b, preferably, the cleaning robot 10 is controlled to rotate clockwise by 90 degrees, and the second real-time ground detection signal value is collected.
[0063] Step S522, judging whether the reflection intensity value of the second real-time ground detection signal value is within the first parameter range;
[0064] Step S523, if the reflection intensity value of the second real-time ground detection signal value is within the first parameter range, control the cleaning robot 10 to travel a preset distance, and return to step S521, that is, the cleaning robot 10 travels a preset distance to detect the ground If the ...
Embodiment 2
[0065] Embodiment two, continue to refer to the attached Figure 5 , combined with the following scenarios, the judgment process of the cleaning robot 10 at c1 is the same as at b;
[0066] After the cleaning robot 10 continues to move forward for a preset distance, it moves from c1 to c2, and it is detected at c2 that the first real-time ground detection signal value does not meet the first condition, then the controller 20 continues to rotate the cleaning robot 10 90 degrees, obtain the second real-time ground detection signal value at c2, and detect that the reflection intensity value in the second real-time ground detection signal value is within the first parameter range, then it can be judged that the cleaning robot 10 has reached the fourth Boundary of Area 400, but cleanup is still incomplete. It can be known from this that the solution of the present invention avoids the cleaning robot 10 from missing cleaning, improves the cleaning effect and work efficiency of the ...
Embodiment 3
[0067] Embodiment 3, step S524, if the reflection intensity value of the second real-time ground detection signal value is not within the first parameter range, then the controller 20 controls the cleaning robot 10 to stop cleaning and end the current local cleaning work. The following example is used to illustrate: control the cleaning robot 10 to travel along the fourth cleaning path 401 to the boundary and reach point d, and detect at point d that the first real-time ground detection signal value does not meet the first condition, then the controller 20 continues to carry out The cleaning robot 10 rotates 90 degrees to obtain the second real-time ground detection signal value at d, and the reflection intensity value of the second real-time ground detection signal value detected is still not within the range of the first parameter, that is, the ground detection module is still not within the range of the first parameter after the cleaning robot 10 rotates. If it is not in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com