Smooth variable-stiffness driver for lower limb exoskeleton
A driver and exoskeleton technology, applied in the field of compliant variable stiffness driver, can solve the problem of difficulty in taking into account the magnitude of the output torque and the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0069] The present invention will be further described in detail below in conjunction with the accompanying drawings.
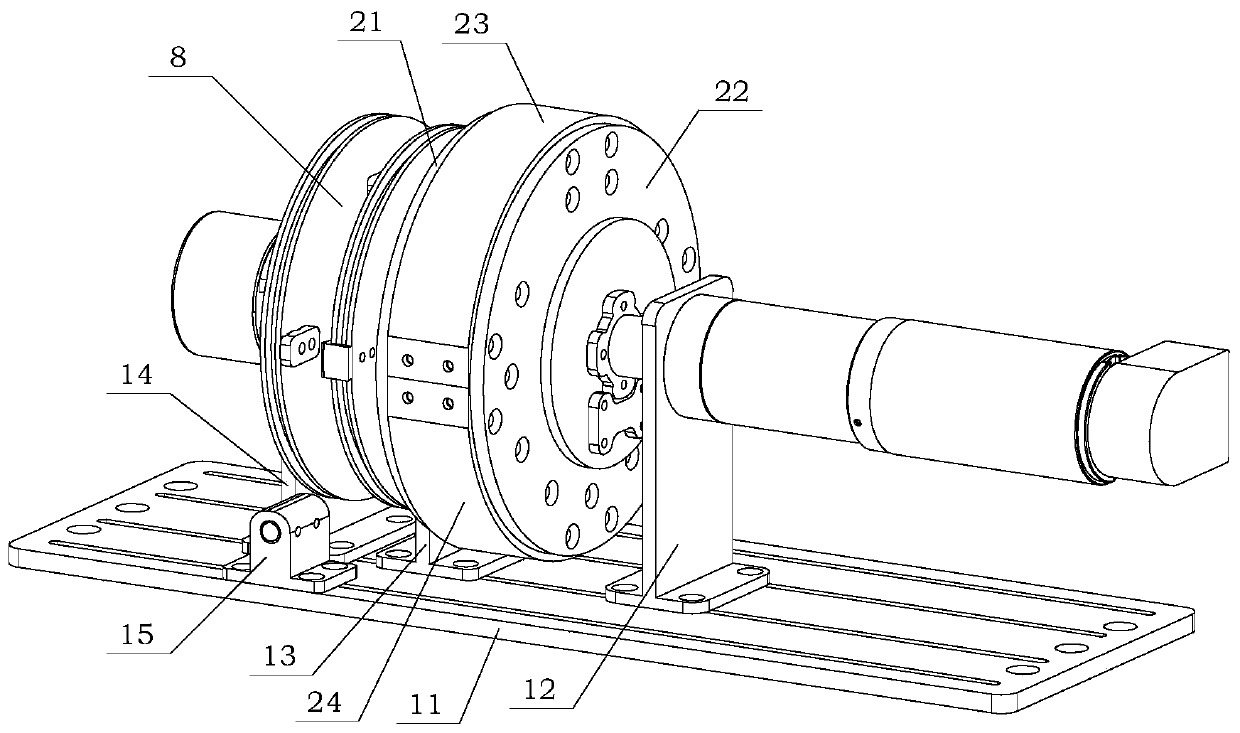
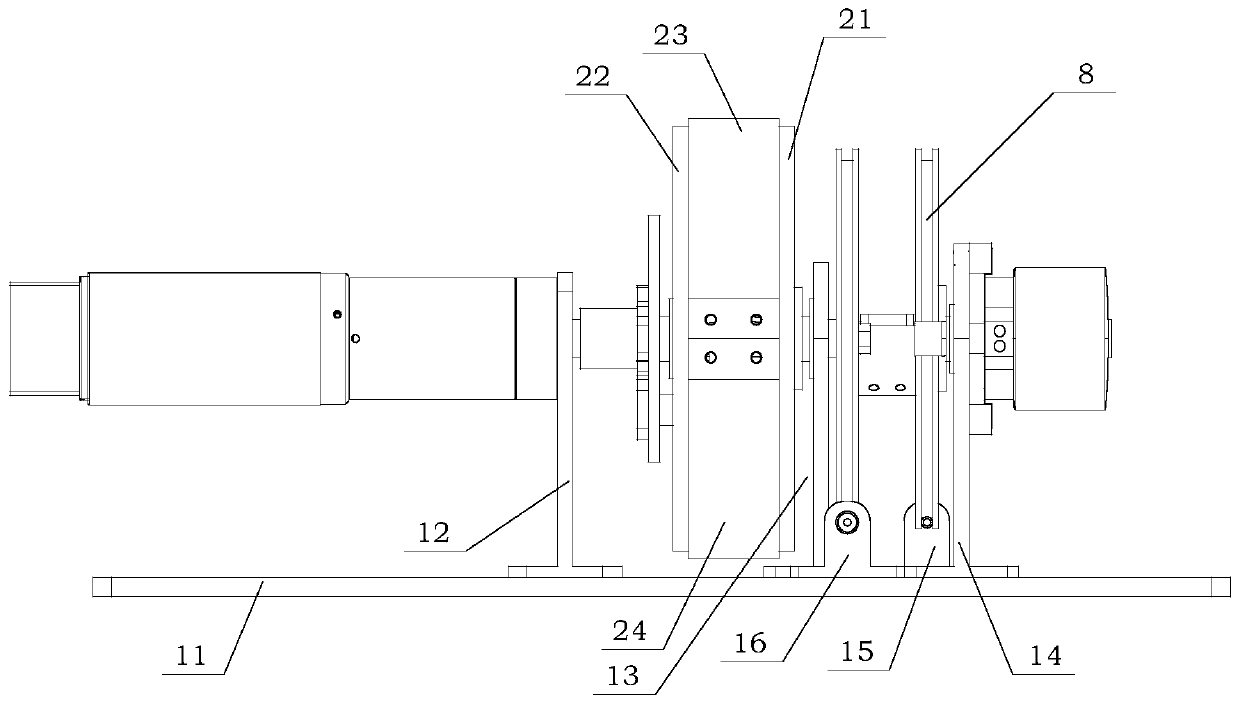
[0070] see figure 1 , Figure 1A , Figure 1B , Figure 1F , Figure 1G As shown, the driver designed for the lower extremity exoskeleton in the present invention has the characteristics of compliance and variable stiffness. The driver includes a support assembly, an outer shell assembly, a spring assembly, a drive assembly and a roller assembly 8 . The spring assembly is placed within the outer housing assembly. Wherein the outer casing component and the roller component keep moving synchronously. In the present invention, the driver is used as the driving unit of the lower extremity exoskeleton, and the hip joint or knee joint is used as the execution unit driven by the driver.
[0071] Support components
[0072] see figure 1 , Figure 1A , Figure 1B , Figure 1C , Figure 1G As shown, the support assembly is composed of base 11, AA upright ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com