Feature matching method for binocular image splicing of mobile inspection robot
An inspection robot and image stitching technology, applied in image enhancement, image analysis, image data processing and other directions, can solve problems such as large amount of calculation, slow matching speed, and complicated operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
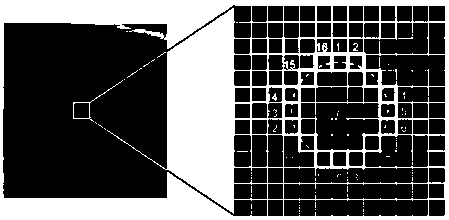
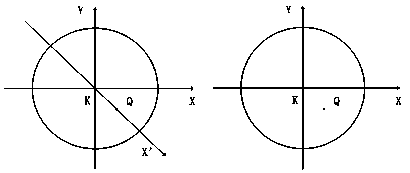
[0075] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with examples, which are only used to explain the present invention and do not constitute a limitation to the protection scope of the present invention. Such as Figure 1-4 As shown, this embodiment provides a feature matching method for binocular image stitching of a mobile inspection robot. The matching method includes the following parts: constructing a scale space, extracting feature points by the FAST algorithm, calibrating CS-LBP to describe feature points, and NNDR Matching strategy and RANSAC eliminate five parts of false matching, and the construction of the scale space part selects the FAST algorithm as the feature detection algorithm in the video mosaic, and adopts the method of constructing a Gaussian scale pyramid; For a pixel on the image, take a circular neighborhood around it, and calculate the gray value difference between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com